# PiCap
# Быстрый старт!
Приложение **PiCap версии 1.1** это часть программно-аппаратного комплекса, которое совместно с приемниками PiGO позволяет собирать фотоматериал с привязкой центров с точностью 2-3 см. Полученные данные легко импортируются в ПО Teobox для предобработки и экспорта в проект Metashape или Pix4D. Данный продукт позволяет получать цифровые модели местности или небольших объектов с точностью 1-5 см в плане и высоте.
ПО разработано под Андроид и его можно скачать в Telegram канале ["Инфа и файлы PiGO PiDATA"](https://t.me/pifiles/776).
Обзор на на приложение PiCap смотрите в видеоролике по ссылке - [https://www.youtube.com/watch?v=WrkwMwb04ko](https://www.youtube.com/watch?v=WrkwMwb04ko)
##### Функционал приложения
- Подключение по BLE / USB к PiGO Lite для получения РТК координат;
- Учет смещения антенны от объектива и наклонов смартфона во время съемки;
- Удобная съемка маркеров с возможностью установки смещения по высоте;
- Настройка камеры с фиксированными параметрами;
- Одиночная или интервальная съемка;
- Просмотр отснятых фотоснимков;
- Импорт фотоснимков в ПО Теобокс по QR коду.
- Применение системы координат к фотоматериалам.
- Выбор объектива (камеры) вашего смартфона;
- Синхронизация любой видеокамеры с РТК от PiGO Lite.
##### Обновление приложения
Чтобы перейти в раздел «О нас», нажмите на логотип на главном экране или найдите его в дополнительных настройках режима съёмки.
[  ](https://wiki.pidt.net/uploads/images/gallery/2026-05/scaled-1680-/photo-2026-05-18-16-47-20.jpg) [ ](https://wiki.pidt.net/uploads/images/gallery/2026-05/scaled-1680-/HSbphoto-2024-10-24-17-34-17.jpg)
#### Порядок работы с PiCap:
##### 1. Подключитесь к приемнику.
Для установки соединения с приёмником, необходимо перейти в раздел подключения, нажав на поле статуса. После этого, нажать кнопку "Подключить" и выбрать вариант подключения (BLE / USB). Далее подключиться к NTRIP кастеру для получения РТК поправок. Подробнее о подключении к РТК сети читайте в статье ["Подключение к приёмнику"](https://wiki.pidt.net/books/picap/page/podkliucenie-k-priemniku-i-nastroika-rtk).[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/ustroistvo.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/ustroistvo.png) [  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nqgphoto-2024-10-24-13-14-52.jpg)
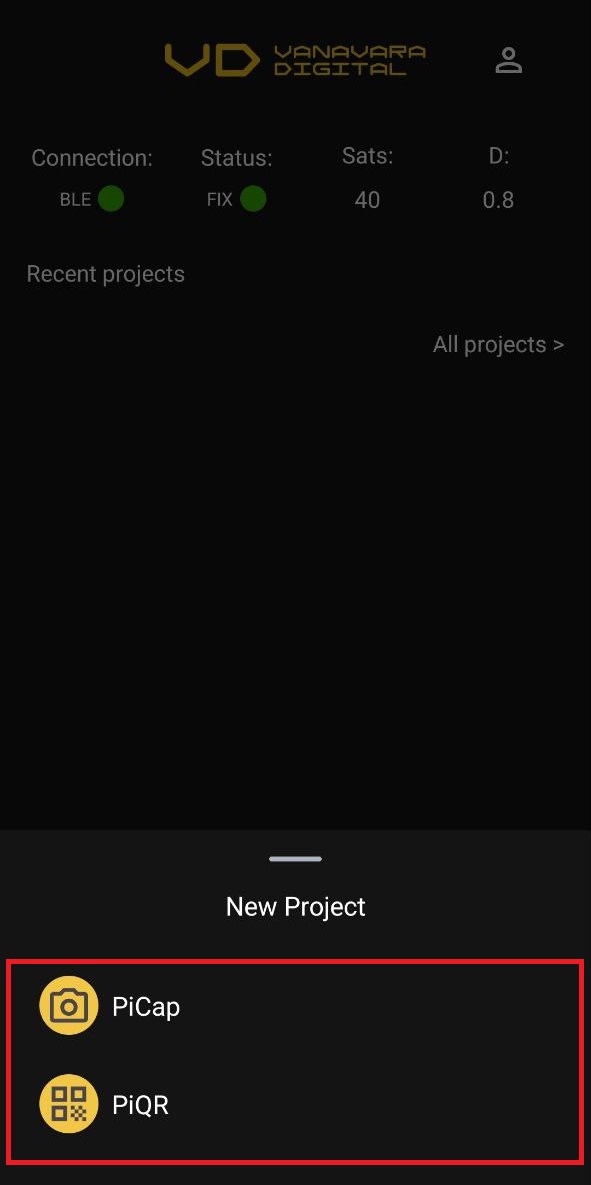
##### 2. Создайте проект.
Перейдите на главный экран приложения и создайте новый проект, нажав на кнопку со знаком "+". Выберите проект "PiCap", если вы планируете сделать фотосъемку с помощью камеры приложения, или "PiQR", если хотите записать видео с помощью своей камеры. О функции PiQR читайте в следующем разделе.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/Fh91.jpg) [ 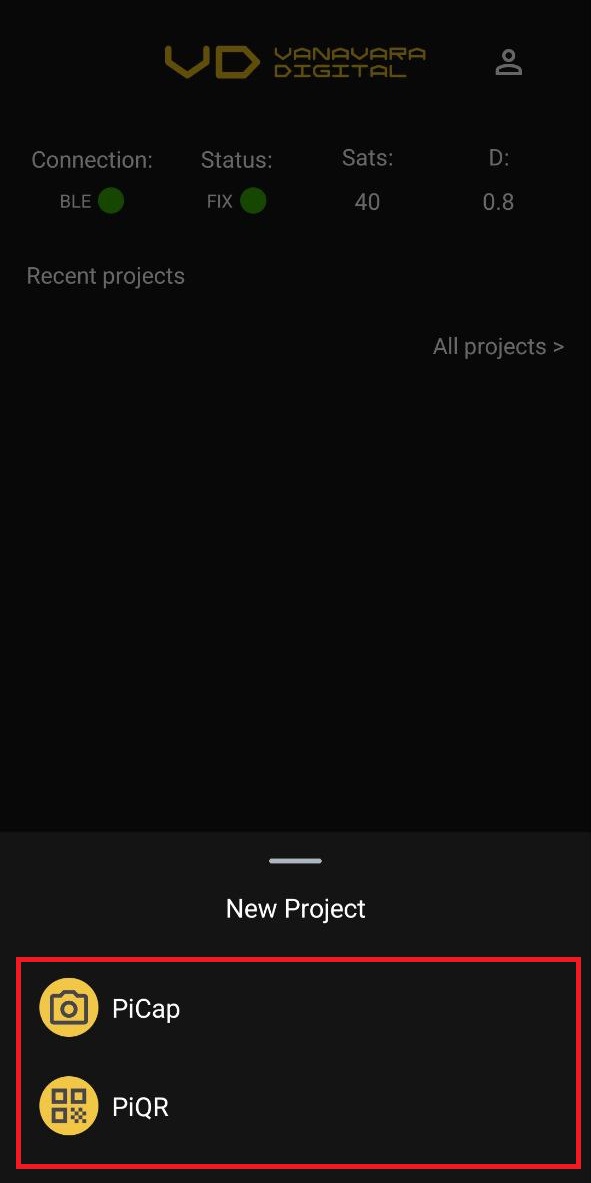 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/2.jpg)
Укажите название вашего проекта и сохраните его. После этого, откроется окно, где вы можете просмотреть и импортировать сохранённые фотоматериалы, перейти в камеру и применить систему координат к метаданным фотоснимков.
Инструкцию по применению системы координат можно найти в статье под названием ["Системы координат и калибровки"](https://wiki.pidt.net/books/picap/page/sistemy-koordinat-i-kalibrovki). О настройке камеры и съёмке читайте по [ссылке](https://wiki.pidt.net/books/picap/page/nastroika-kamery-i-sieemka).
Для удаления проекта, нажмите кнопку “All projects”, далее на название нужного проекта и удерживайте нажатие. Затем появится запрос на подтверждение удаления.
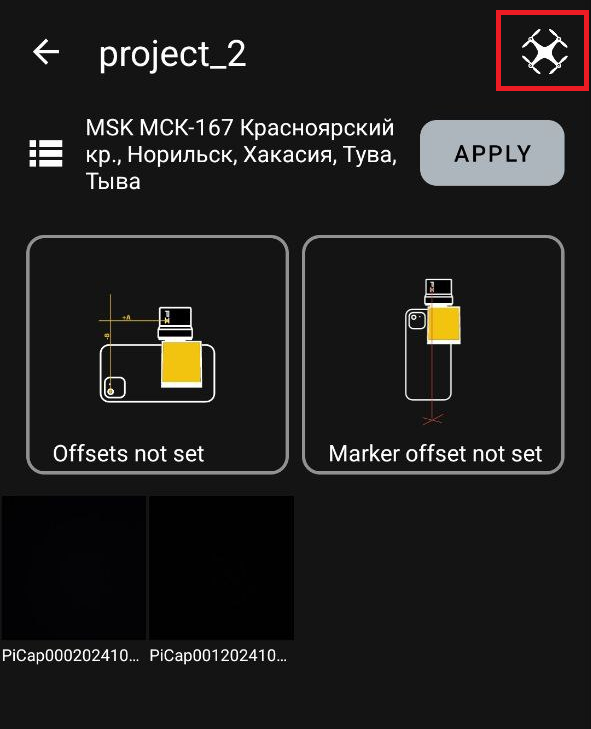
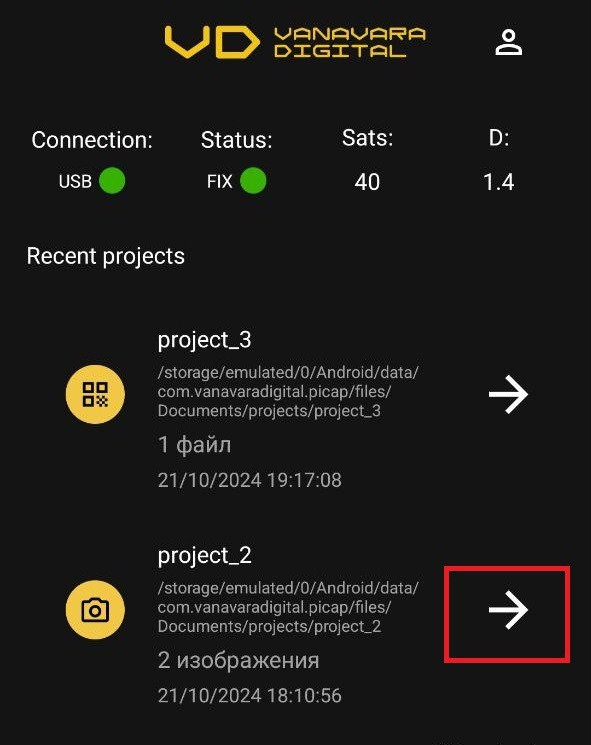
##### 3. Импортируйте фотоснимки.
Перейдите в ваш проект и нажмите на кнопку, выделенную красным цветом на скриншоте. После этого, откроется камера для сканирования QR кода из ПО Teobox.
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/esport.png)
Импортировать фотоснимки можно после авторизации в сервисах PIDT.Net. Процесс авторизации описан в статье ["Авторизация в сервисах PIDT.Net"](https://wiki.pidt.net/books/picap/page/avtorizaciia-v-servisax-pidtnet).[ ](https://wiki.pidt.net/uploads/images/gallery/2024-04/61lknopka-proekt.png)
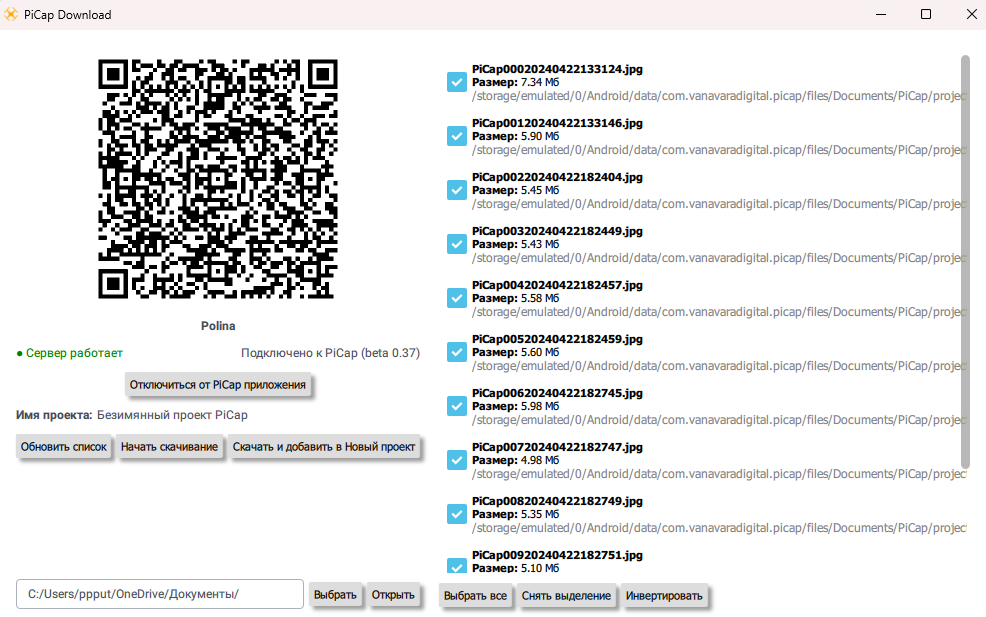
Скачайте [ПО Teobox](https://t.me/teodrone/456), при установки ПО выберите компонент Teobox Beta. Откройте QR код по кнопке "PiCap Download". После сканирования QR кода ваши проекты синхронизируются и вы сможете использовать фотоматериалы из приложения PiCap.
[](https://wiki.pidt.net/uploads/images/gallery/2024-04/snimok-ekrana-2024-04-27-110514.png)
##### Порядок работы с PiQR:
PiQR — это функция, позволяющая синхронизировать любую видеокамеру с системой RTK от PiGO Lite. Чтобы начать, перейдите на главный экран приложения и подключите приёмник. Выберите проект PiQR, затем создайте новый проект, нажав на кнопку «+».
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/BATvybor-proekta.jpg) [  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-15-24-27.jpg)
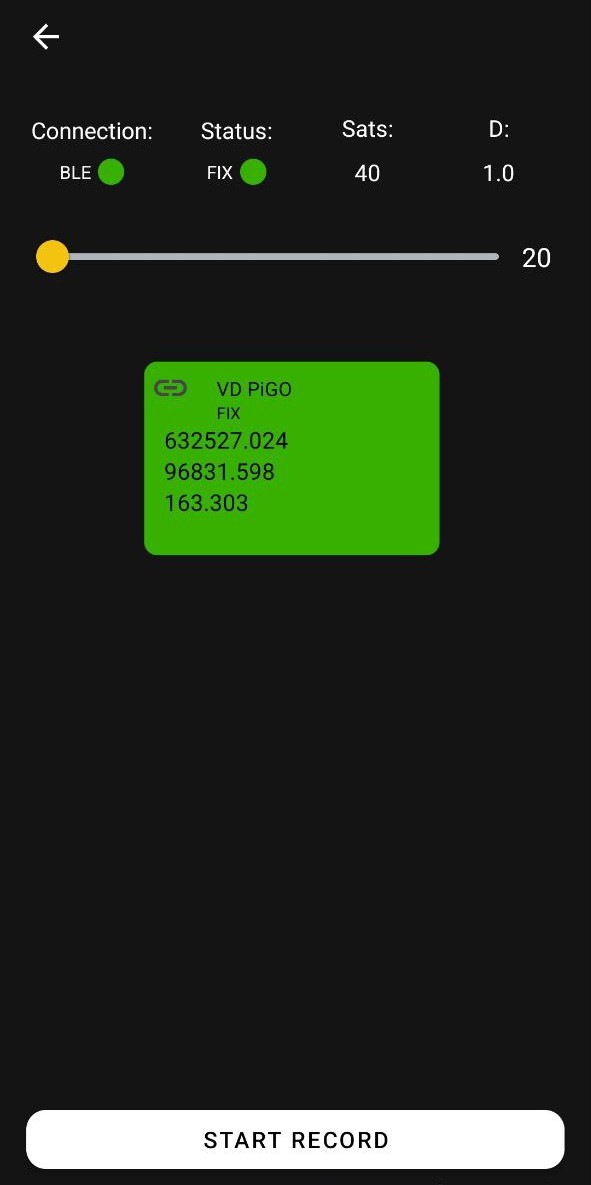
Откройте новый проект PiQR и примените систему координат. Если СК отсутствует, добавьте новую с помощью инструкции, доступной по [ссылке](https://wiki.pidt.net/books/picap/page/sistemy-koordinat-i-kalibrovki). Затем нажмите на кнопку, обозначенную на скриншоте ниже, и активируйте кнопку "Start Record". На экране появится QR-код; наведите ваши видеокамеры на него и начните запись.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/BATvybor-proekta.jpg)
При сканировании QR-кода, удерживайте камеру в фокусе не менее 4-5 секунд. Обязательно поднесите её как можно ближе к QR-коду, затем медленно отдалитесь.
Если вы планируете задействовать несколько камер, используйте ползунок, чтобы увеличить время отображения QR-кода.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/scaled-1680-/photo-2024-10-24-13-14-54.jpg) [ ](https://wiki.pidt.net/uploads/images/gallery/2026-05/scaled-1680-/photo-2026-05-18-16-03-59.jpg)
По завершении записи импортируйте ваши видеофайлы и файлы с РТК координатами в формате PSV в программное обеспечение [VD Video Capture Tool](https://wiki.pidt.net/books/vd-video-capture/page/bystryi-start).
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-13-14-53-5.jpg)
# Подключение к приёмнику и настройка РТК
Данное руководство описывает процесс подключения мобильного устройства к приёмнику, а также настройку получения поправок через NTRIP-кастер для работы в режиме RTK.
##### Подключение к приёмнику
Для начала работы необходимо установить соединение между приложением и оборудованием.
1. Запустите приложение [PiCap ](https://t.me/pifiles/776)и перейдите на главный экран.
2. Нажмите на поле статуса подключения, далее на кнопку "Подключить".[ ](https://wiki.pidt.net/uploads/images/gallery/2026-02/hYyphoto-2026-02-25-15-16-55.jpg)
[ 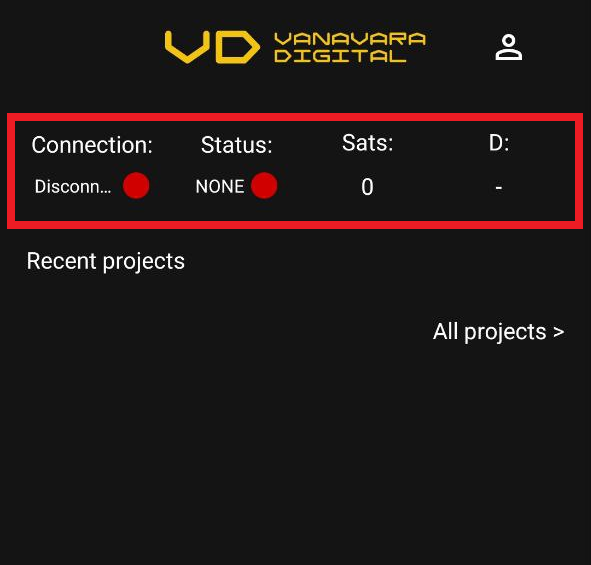 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/furustroistvo.png) [ 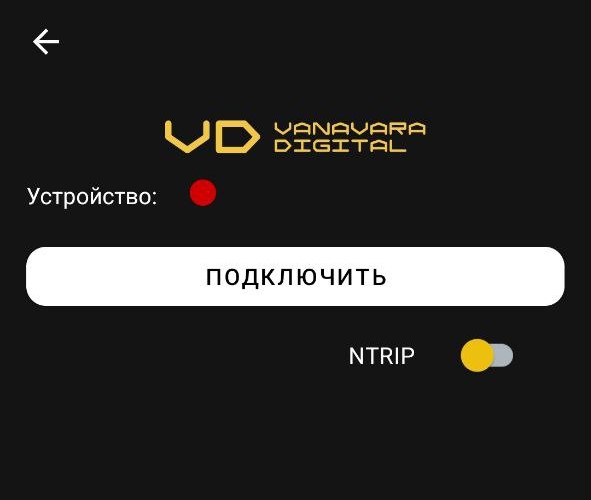 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-13-14-52.jpg)
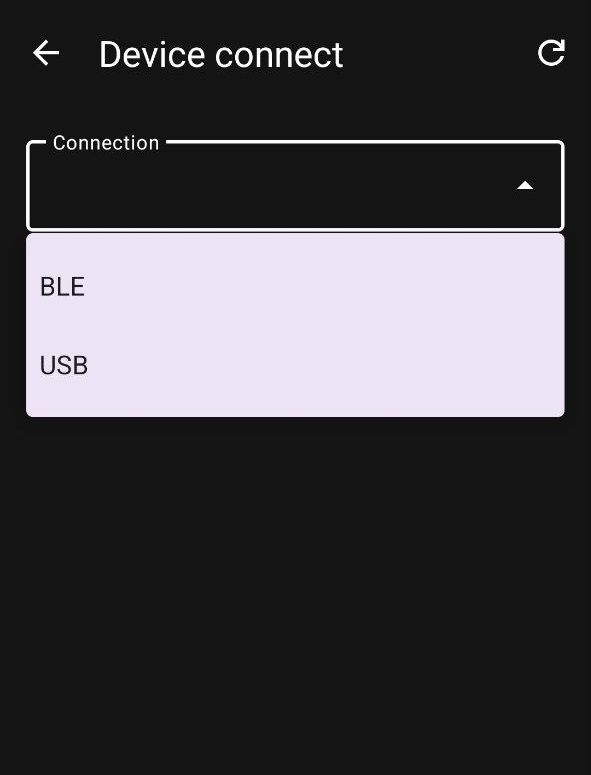
3. В открывшемся меню выберите тип соединения: BLE (Bluetooth) или USB. Дождитесь появления списка доступных устройств. Выберите из списка ваш приёмник и нажмите на него для установки соединения.[ ](https://wiki.pidt.net/uploads/images/gallery/2026-02/V3Cphoto-2026-02-25-15-31-32.jpg)
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/1zephoto-2024-10-22-14-04-42.jpg)
##### Настройка NTRIP-кастера
Для получения поправок и работы в режиме RTK необходимо настроить подключение к кастеру.
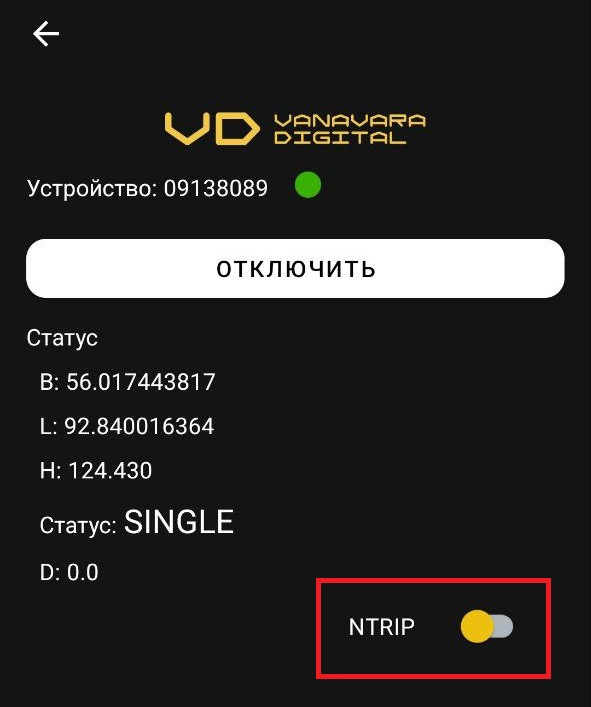
1. После успешного подключения к приёмнику найдите переключатель "NTRIP". Смахните ползунок в активное положение.
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-14-04-44.jpg)
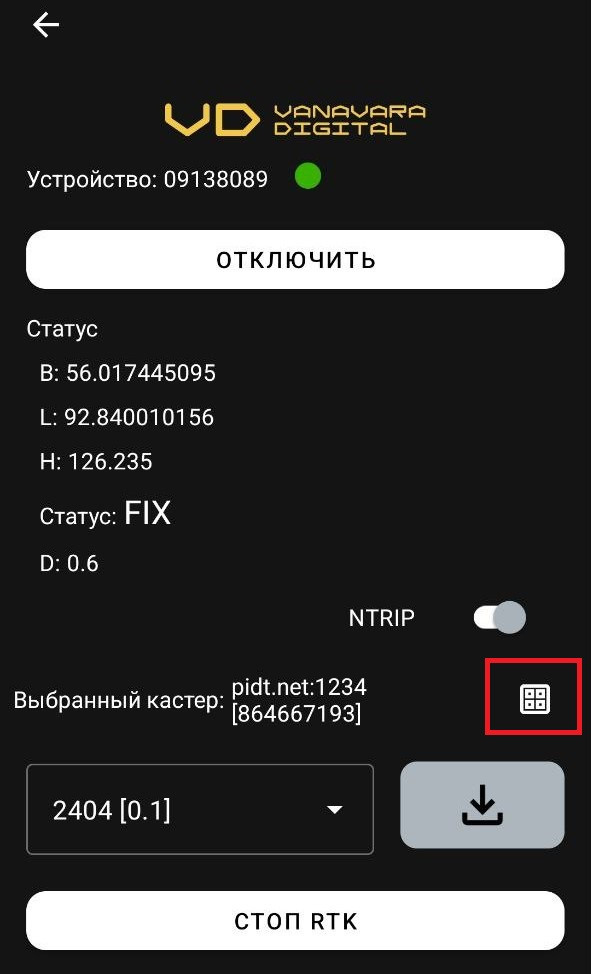
2. Появятся дополнительные поля настроек. Нажмите на кнопку, расположенную рядом с ползунком, чтобы перейти в окно конфигурации.
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-13-14-53-4.jpg)
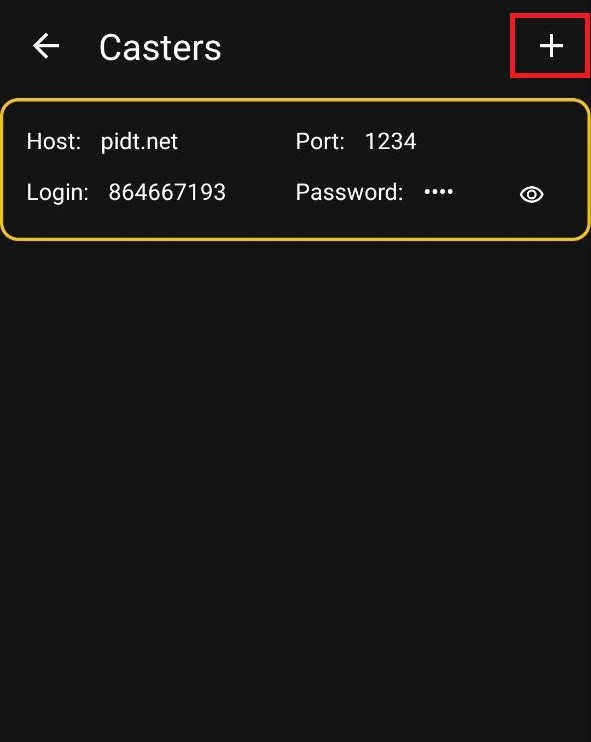
3. Заполните все требуемые данные для подключения к сети RTK, например pidt.net:
- хост: pidt.net
- порт: 1234 / 2101
- пароль и логин: получить можно в Telegram боте [PiDATA user bot](https://t.me/pi2r2bot)
- GGA: для работы с VRS сетями
4. После заполнения данных нажмите кнопку "Сохранить" и вернитесь на предыдущий экран.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-07/3.jpg) [ 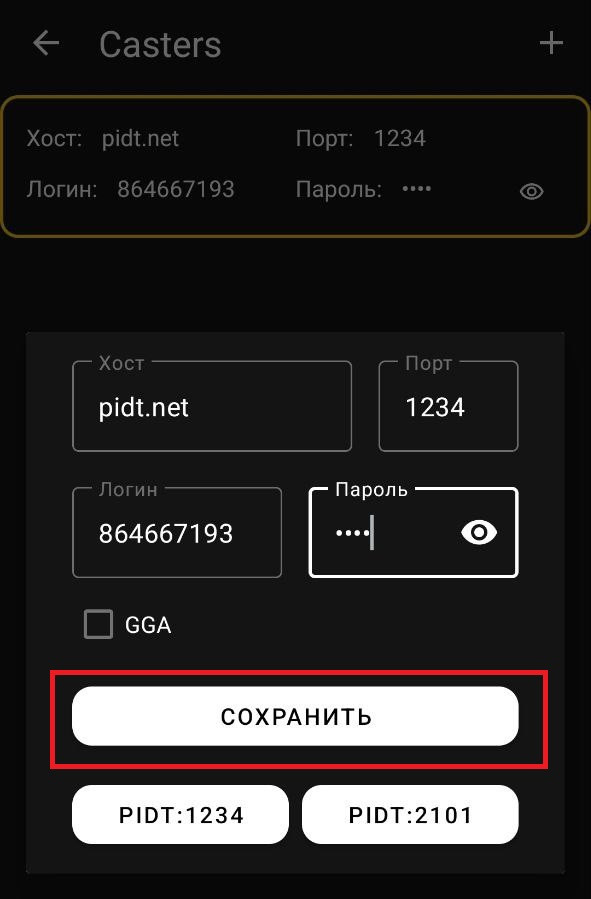 ](https://wiki.pidt.net/uploads/images/gallery/2024-07/HuY1.jpg)
5\. Нажмите кнопку "Загрузить" и выберите из списка нужную базовую станцию.
[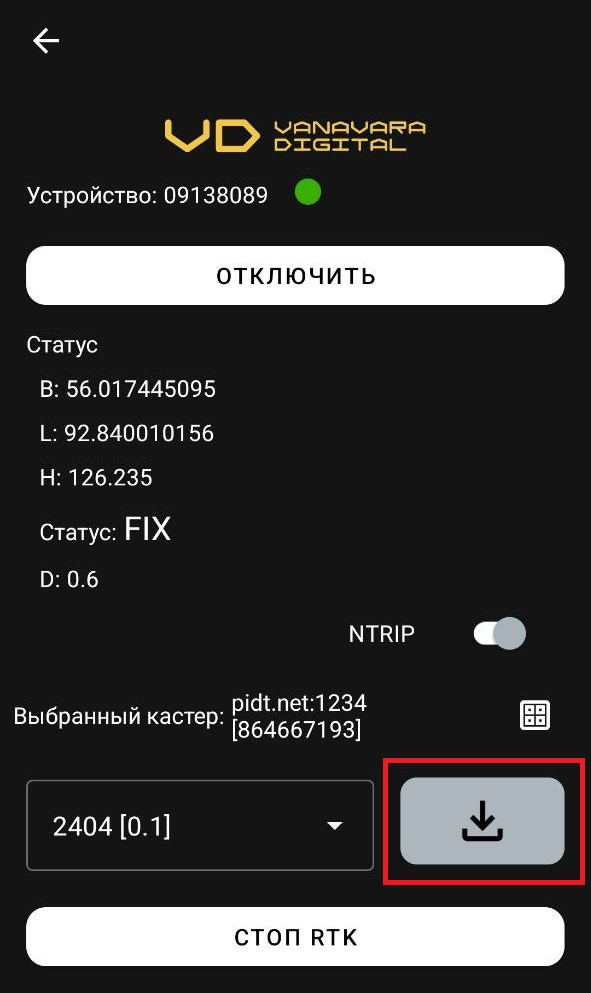](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-14-08-52.jpg)
6. Для запуска режима, нажмите кнопку "Старт RTK".[ ](https://wiki.pidt.net/uploads/images/gallery/2026-02/demphoto-2026-02-25-17-19-09.jpg)
После настройки приёмника, PiCap начнёт получать РТК-координаты, которые в свою очередь будут записаны в метаданные снимка.
# Настройка камеры и съёмка
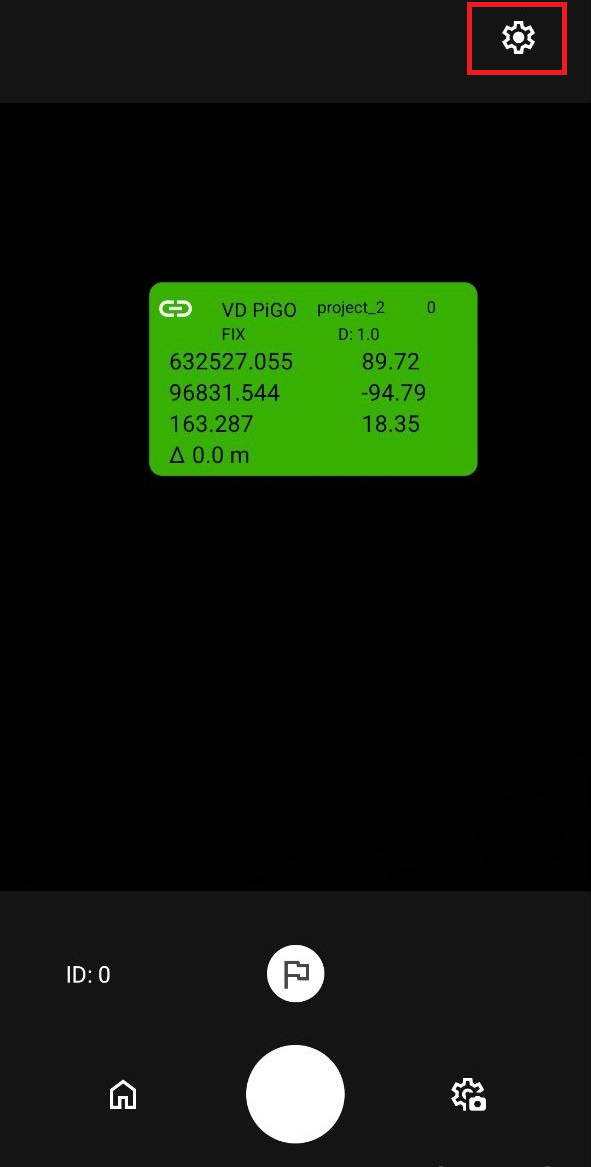
Откройте ваш проект PiCap и нажмите кнопку, выделенную на скриншоте ниже. Откроется окно съёмки, где будет указан проект и РТК координаты, которые вы используете в данный момент.
Кнопка перехода в режим съёмки станет доступна только после добавления [системы координат](https://wiki.pidt.net/books/picap/page/sistemy-koordinat-i-kalibrovki).
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/0zYkamera.png) [ 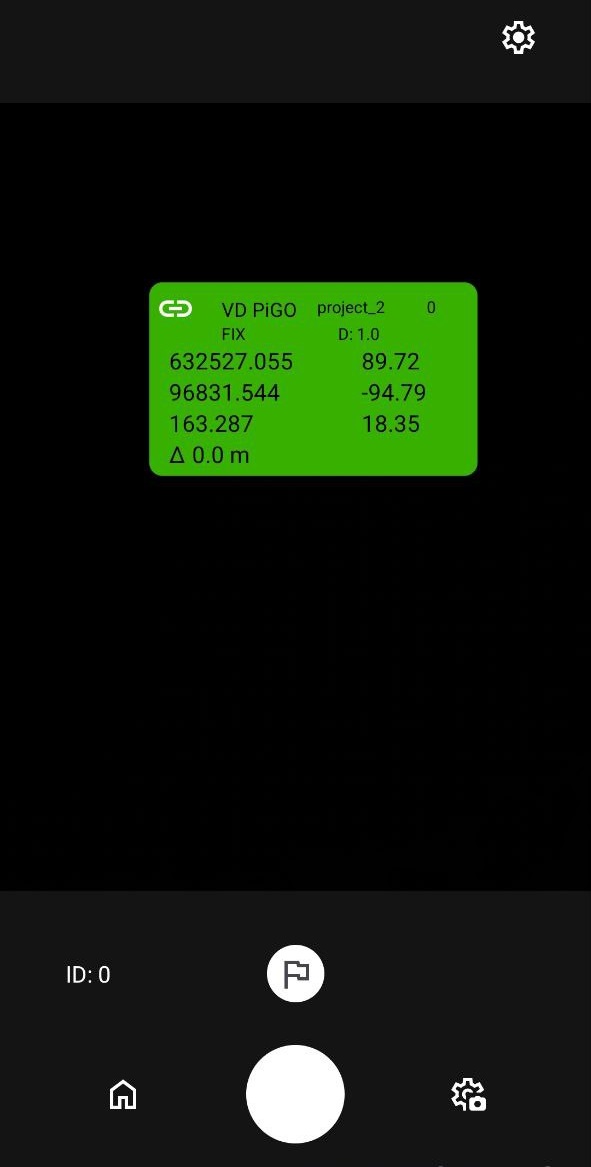 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-21-18-17-14.jpg)
##### Настройка камеры
Перед съёмкой, настройте следующие параметры камеры:
- Фокус - фокус камеры устанавливается вручную, либо автоматически по кнопке "Auto".
- Выдержка и ISO - выдержка и уровень чувствительности к свету устанавливаются вручную, либо автоматически по кнопке "Auto".
- EV - устанавливает экспозицию в автоматическом режиме.
- Таймер - устанавливает время между снимками кадров.
- Ручное управление - включает режим ручного использования настроек.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nastroiki-kamery.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nastroiki-kamery.png) [  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/UGOkamera.jpg)
##### Настройка объектива
ID - выбор объектива (камеры) вашего смартфона.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nastroiki-obieektiv.png)
[ 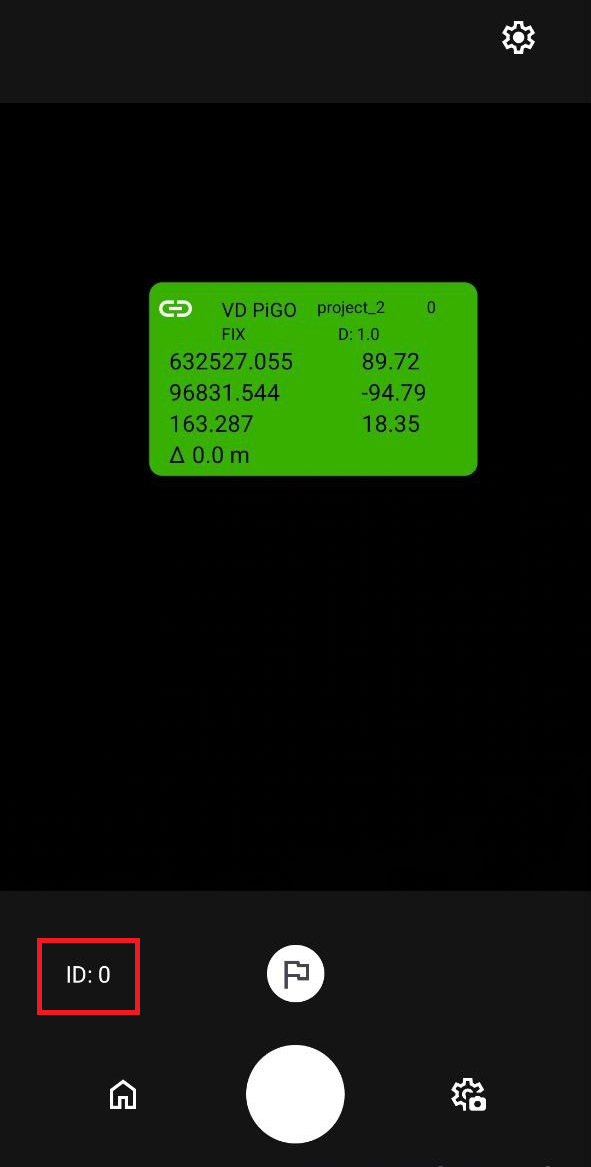 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nastroiki-obieektiv.png) [ 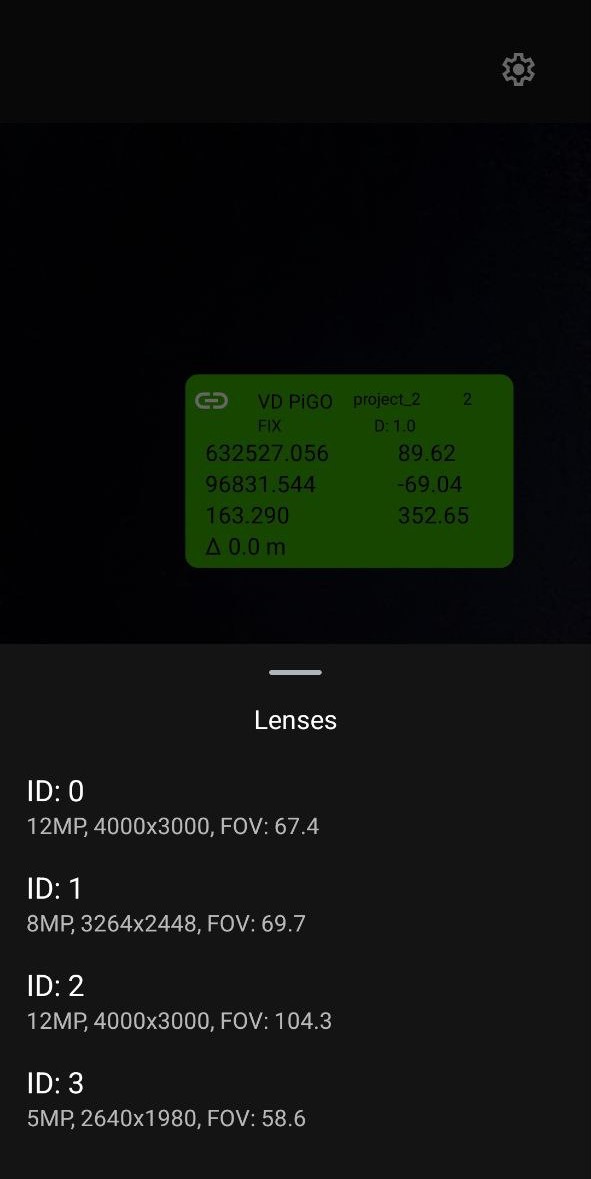 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/5Oxjtrnbd.jpg)
##### Съёмка объектов
После установки настроек камеры, приступайте к съёмке объектов. Сьёмка производится в трёх вариантах:
1. По нажатию клавиш громкости на смартфоне.
2. По нажатию кнопки, выделенной на скриншоте ниже.
[
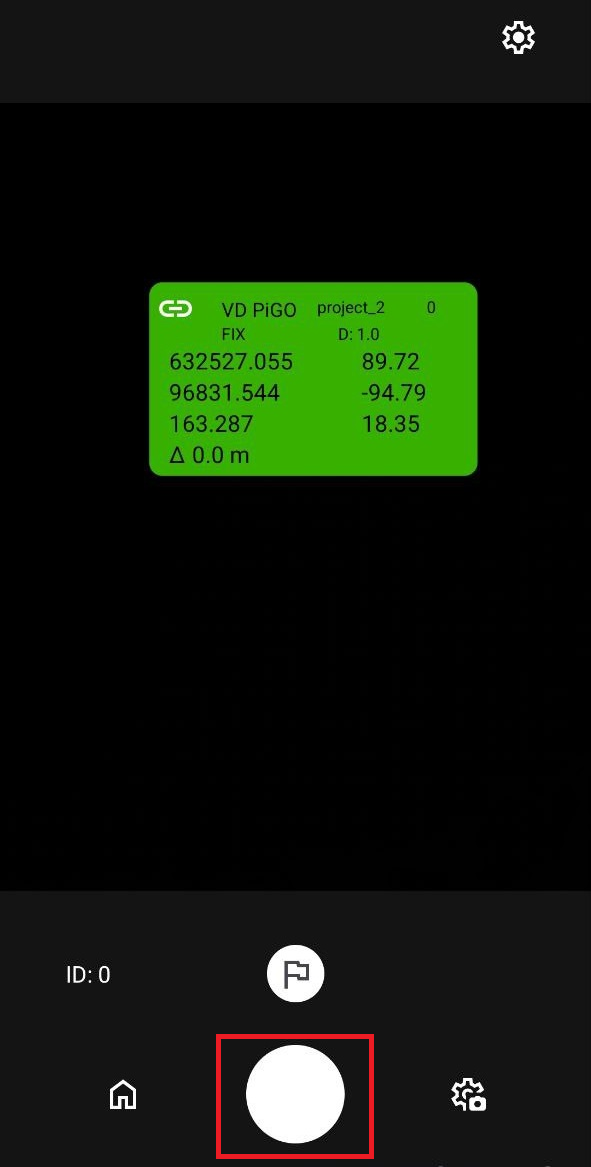](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera2.png)
3. Используя опознаки. При использовании этого варианта, необходимо нажать на иконку флага и на кнопку "Сделать снимок". В момент нажатия кнопки, к фотоснимку применяется опознак с вашим названием.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera1.png)
[ 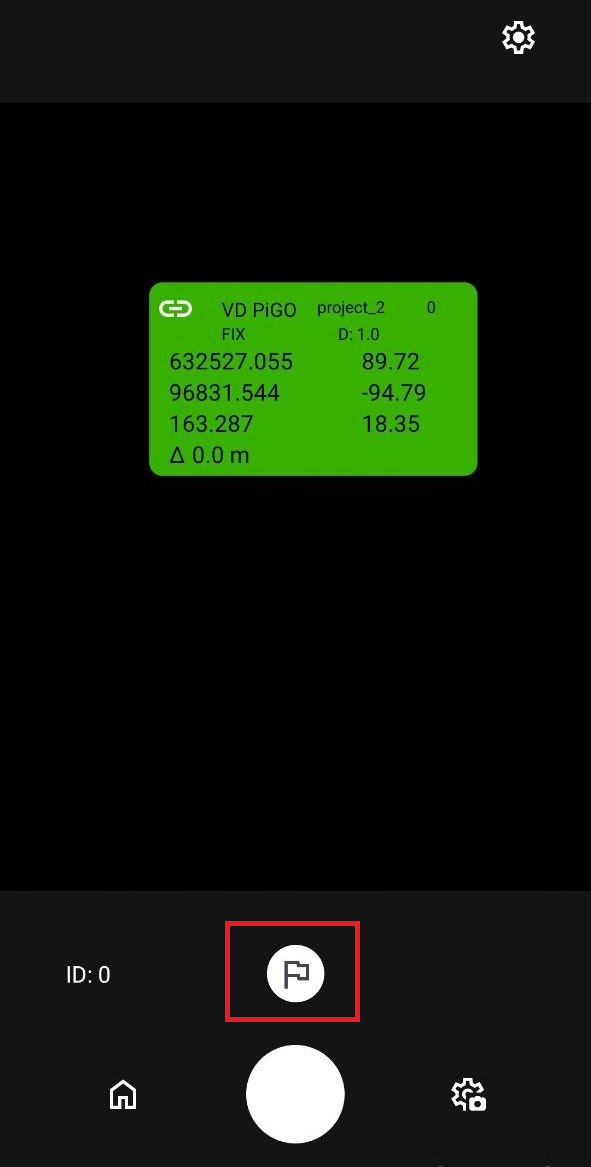 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera1.png) [ 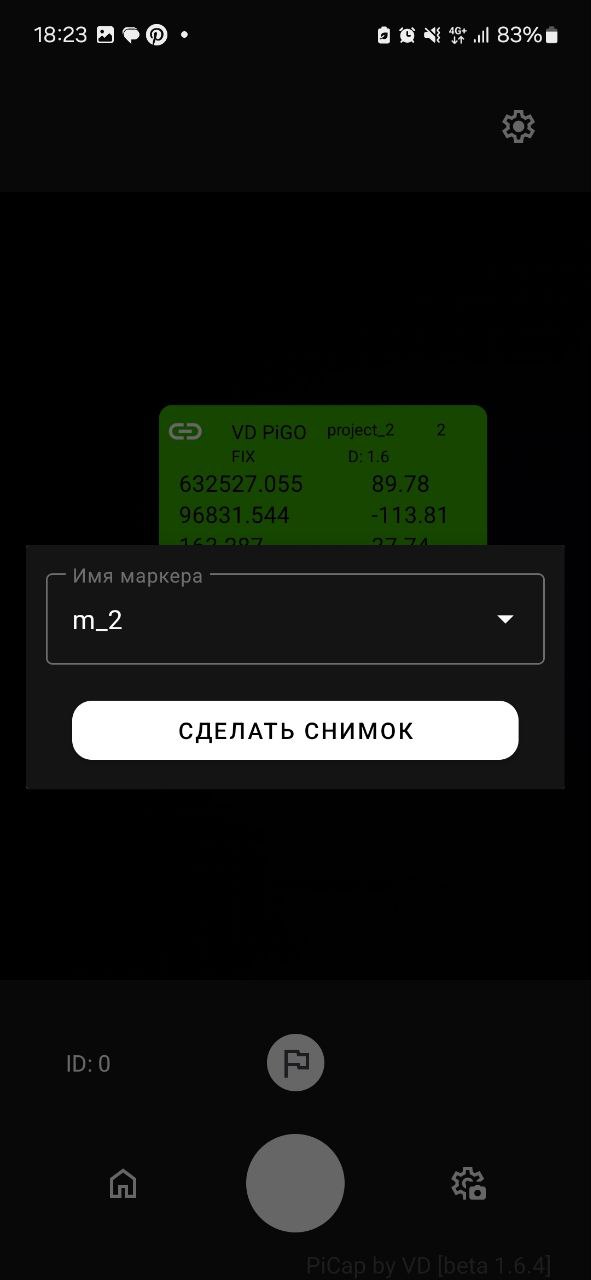 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera3.jpg)
Опознаки используются для сопоставления и сравнения ключевых точек между разными изображениями. Это помогает найти соответствия между объектами на разных фотографиях и построить модели на их основе.
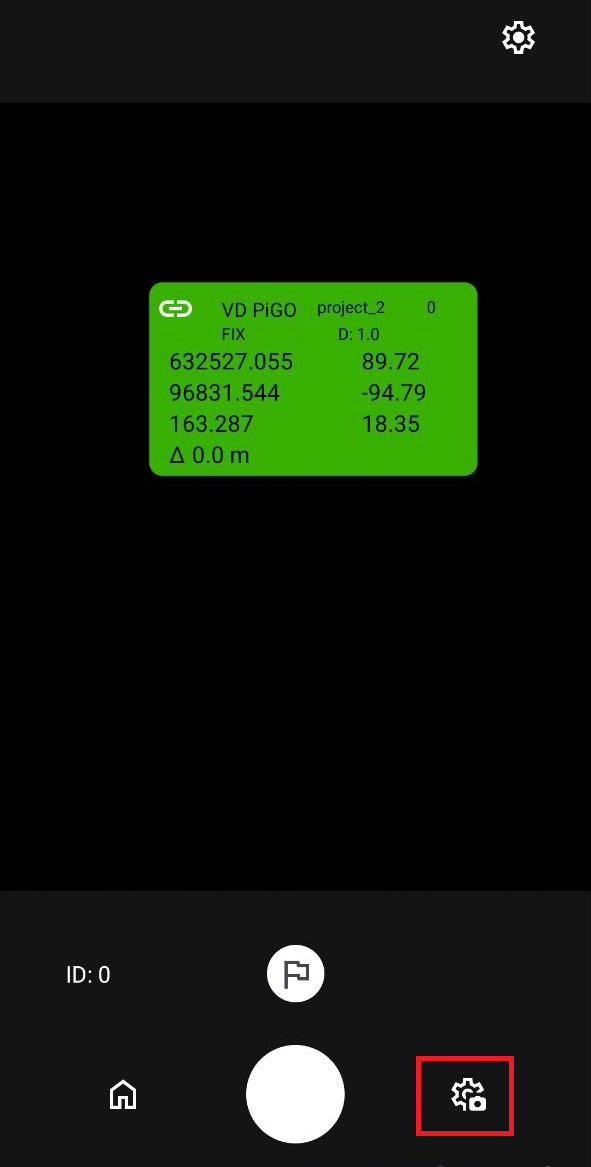
##### Дополнительные параметры съёмки
- Изображение призрак - включает полупрозрачное изображение предыдущего снимка.
- Focus Assist - зумирует изображение при ручном фокусе.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/nastroiki-gnss.png) [ 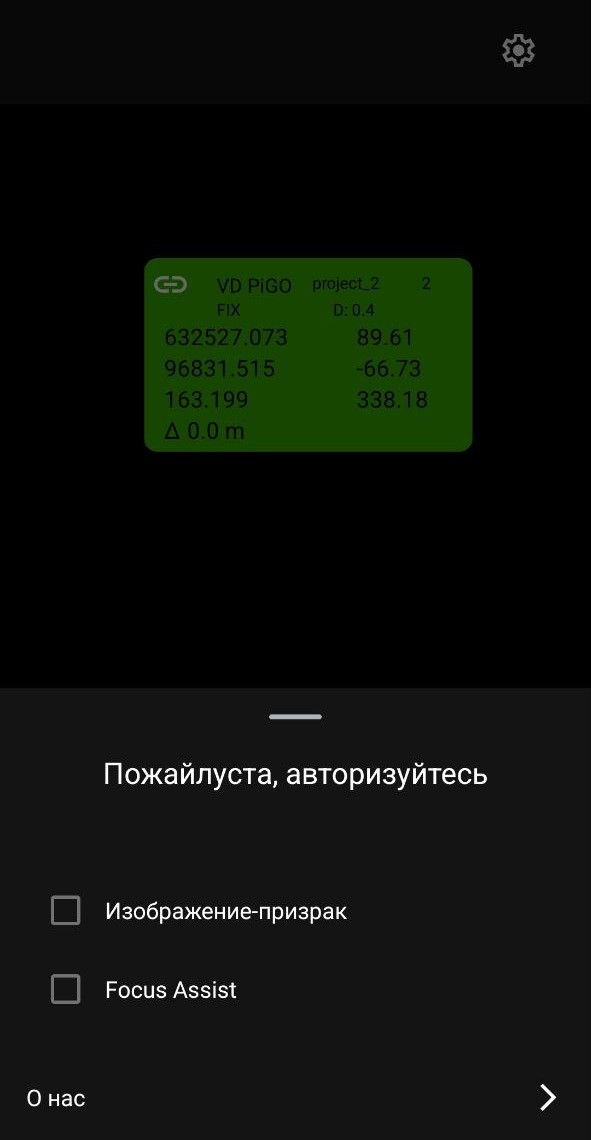](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-17-34-17.jpg)
Параметры смещений антенны и метки задаются при настройке проекта. Подробнее об этих параметрах читайте в статье по [ссылке](https://wiki.pidt.net/books/picap/page/parametry-smeshhenii-antenny-i-metki).
# Системы координат и калибровки
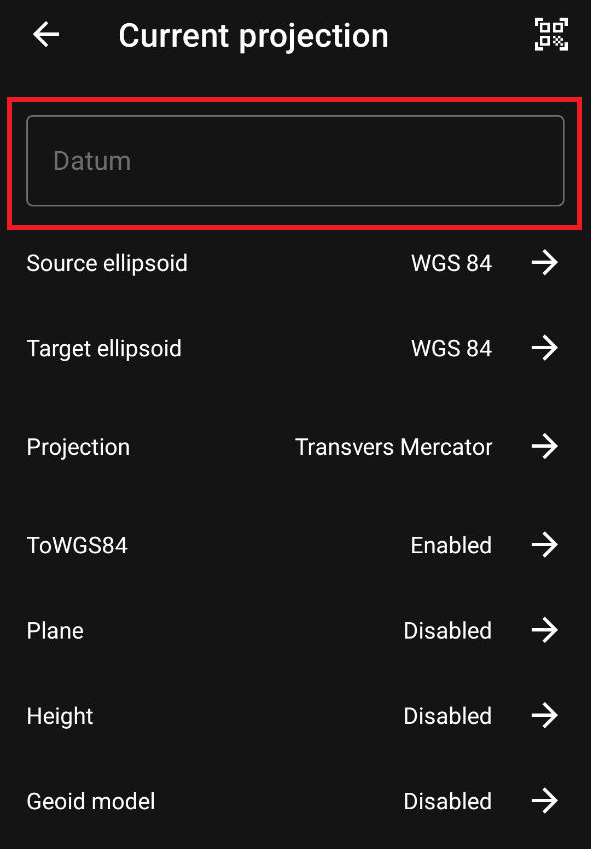
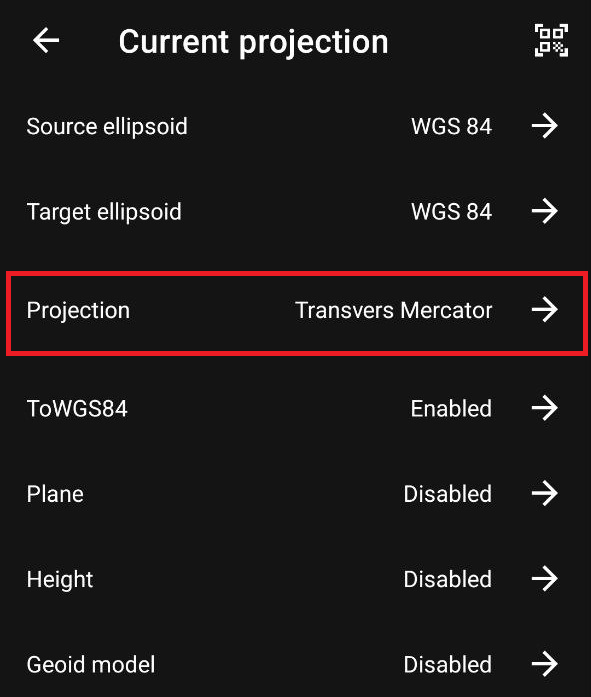
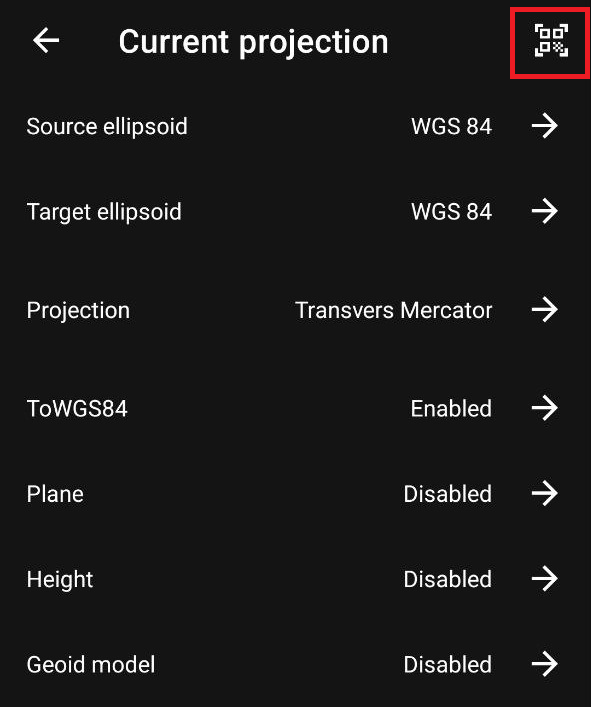
В разделе «Projection» выполняются операции связанные с созданием и управлением системами координат и их параметрами. Раздел состоит из следующих блоков:
- Datum - Имя системы координат
- Source ellipsoid - Исходный эллипсоид
- Target ellipsoid - Целевой эллипсоид
- Projection - Параметры проекции
- ToWGS84 - Пользовательский datum
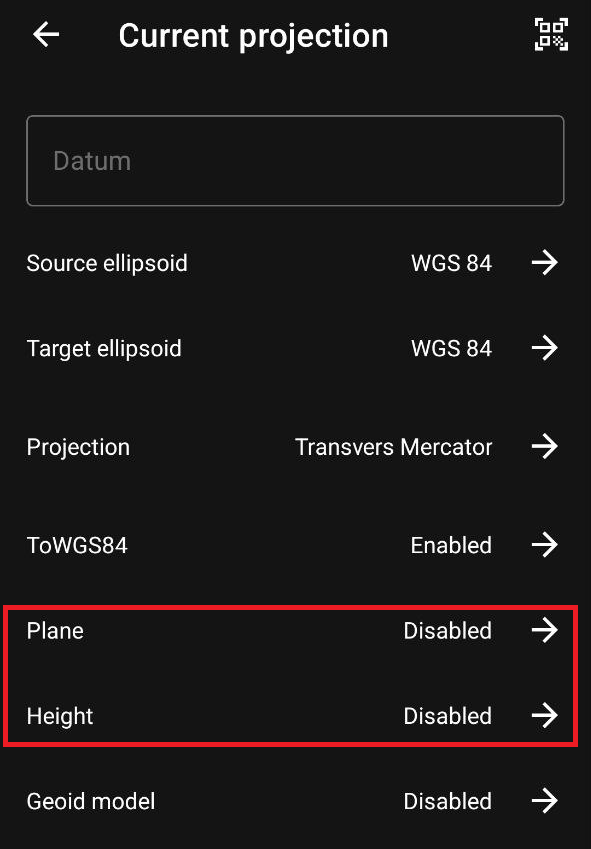
- Plane - Калибровка в плане
- Height - Калибровка по высоте
- Geoid model - Модель геоида
Систему координат можно подключить при открытии вашего проекта. Все ранее созданные проекты будут видны на главном экране. Как только вы откроете необходимый проект, просто нажмите на кнопку, изображённую на скриншоте ниже.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/2xr1.jpg)
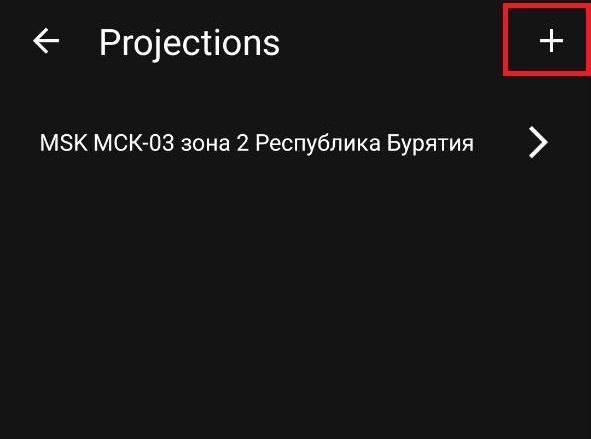
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/2xr1.jpg) [ 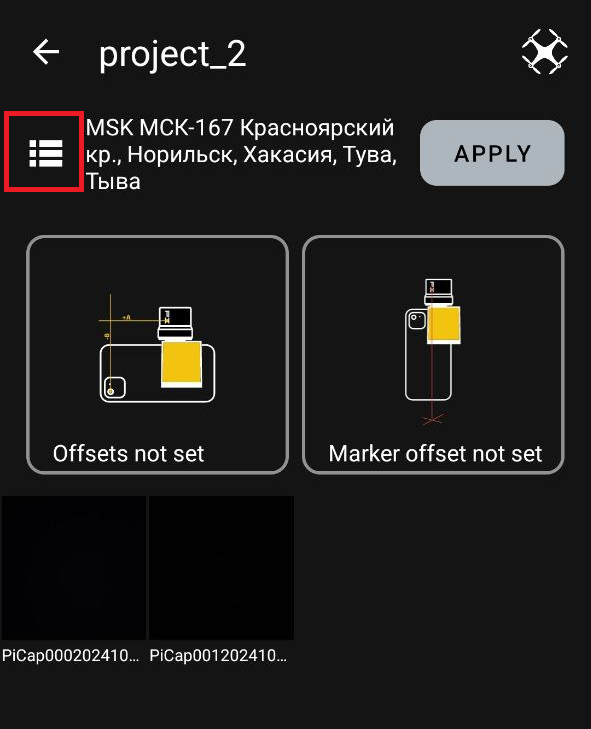 ](https://wiki.pidt.net/uploads/images/gallery/2024-10/sk.png)После перехода в раздел «Projection», нажмите на значок «+» в правом верхнем углу экрана, чтобы добавить новую систему координат.
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-16-44-44.jpg)
#### Порядок установки системы координат
##### Установка системы координат вручную
1. Укажите имя проекта и выберите эллипсоид.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-08/jGIimage.png) [ 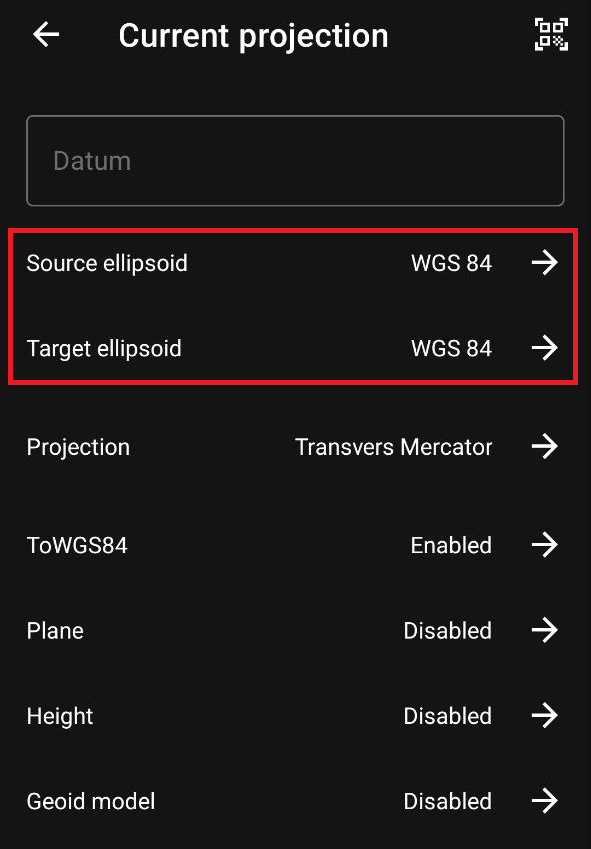](https://wiki.pidt.net/uploads/images/gallery/2024-08/mNkimage.png)
2\. Настройте параметры проекции и пользовательский datum.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-08/wgIimage.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-08/wgIimage.png) [ 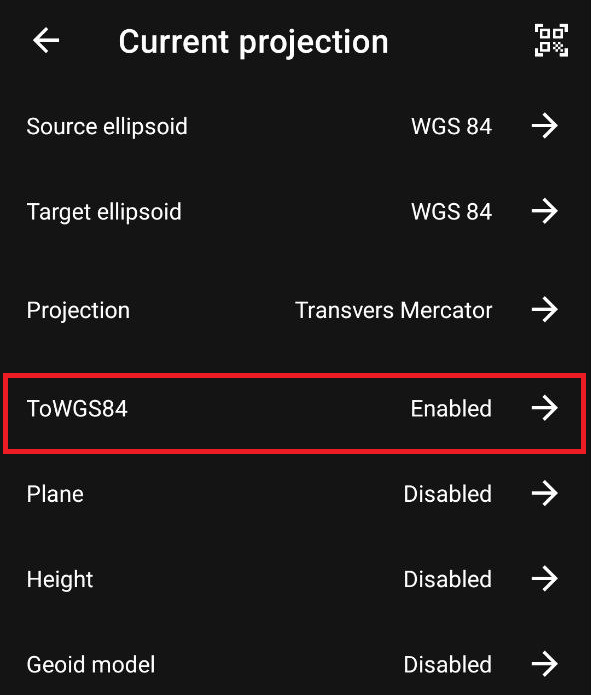](https://wiki.pidt.net/uploads/images/gallery/2024-08/gYYimage.png)
3\. Настройте калибровку в плане и по высоте. Загрузите модель геоида для приведения эллипсоидальной высоты к нормальной.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-08/aZoimage.png) [ 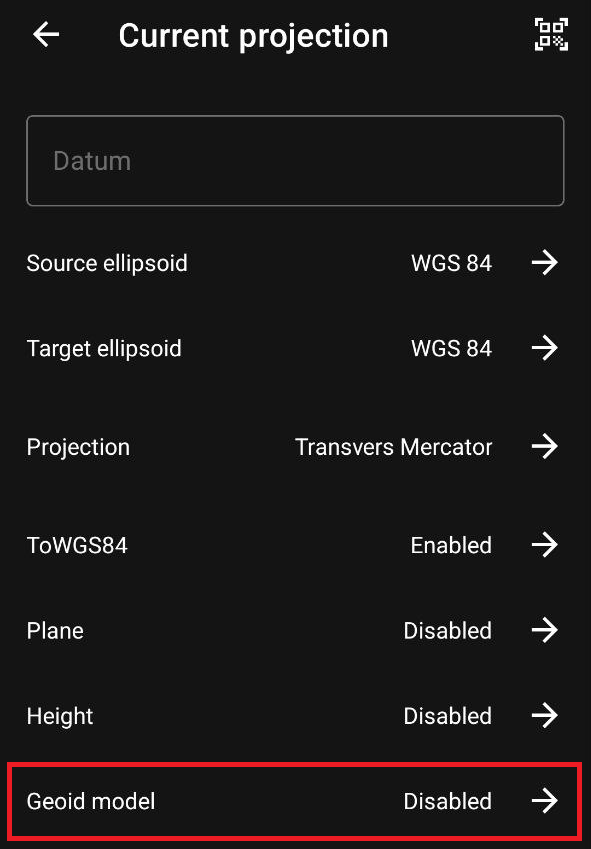](https://wiki.pidt.net/uploads/images/gallery/2024-08/mCFimage.png)
##### Импорт системы координат
Для импорта системы координат переходим в Telegram канал [PRJ to QR](https://t.me/prj2qrbot), в строке сообщения пишем: @findprjbot МСК и выбираем нужную зону. В ответ бот отправит QR код, содержащий информация о вашей СК и калибровке для расчета высоты. Для загрузки системы координат в PiCap, откройте камеру в правом верхнем углу экрана и наведите на QR код.
[](https://wiki.pidt.net/uploads/images/gallery/2024-08/1bSimage.png)
Как загрузить систему координат из стороннего ПО читайте в книге [“Миграция из стороннего ПО”](https://wiki.pidt.net/books/migraciya-iz-storonnego-po).
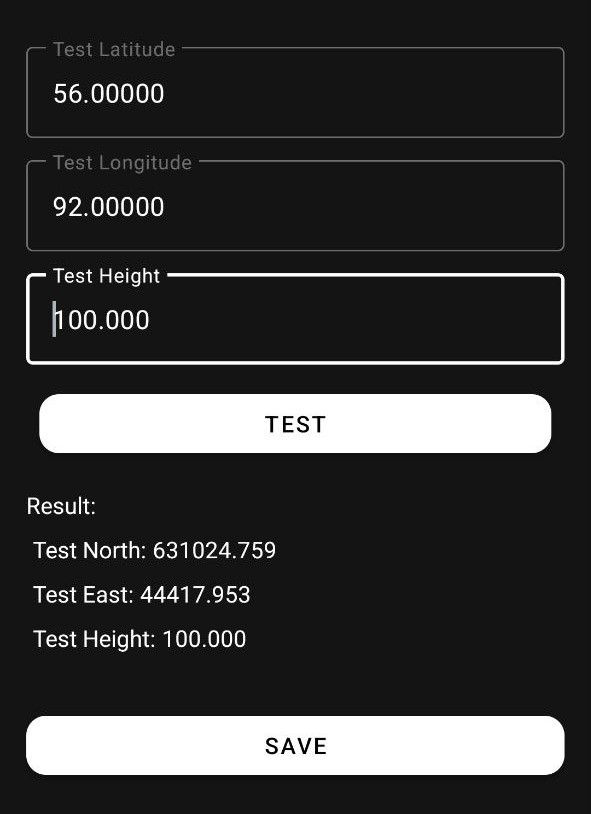
##### Тестирование СК
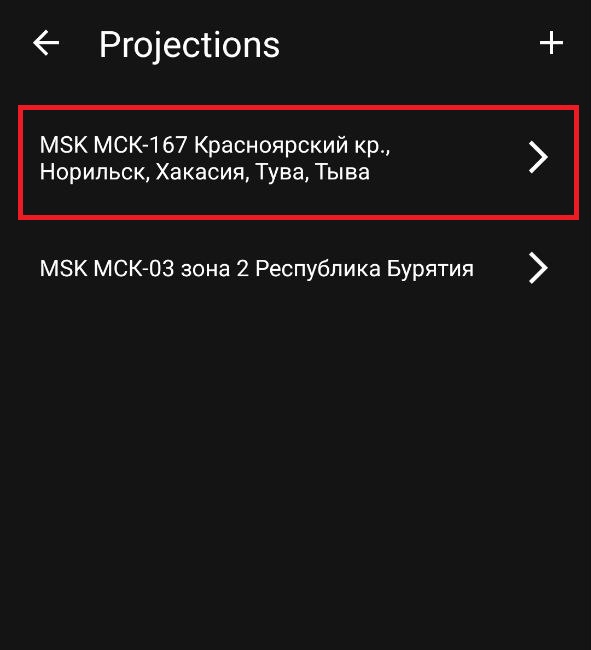
После того, как вы настроили систему координат, убедитесь, что PiCap корректно показывает локальные координаты точки, проведя тестовую проверку при помощи кнопки "Test". В случае правильного отображения координат, сохраните установленную систему координат. Добавленные системы координат будут представлены в этом же разделе. Выберите необходимую систему координат из списка для дальнейшего пользования. [ ](https://wiki.pidt.net/uploads/images/gallery/2024-08/TWGimage.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-08/TWGimage.png) [ 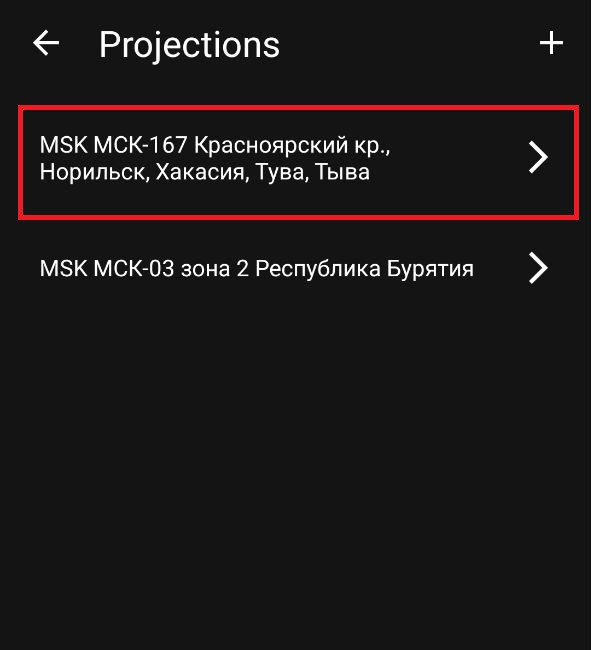](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-16-04-47.jpg)
Для удаления системы координат, удерживайте нажатие на её названии. Затем появится запрос на подтверждение удаления.
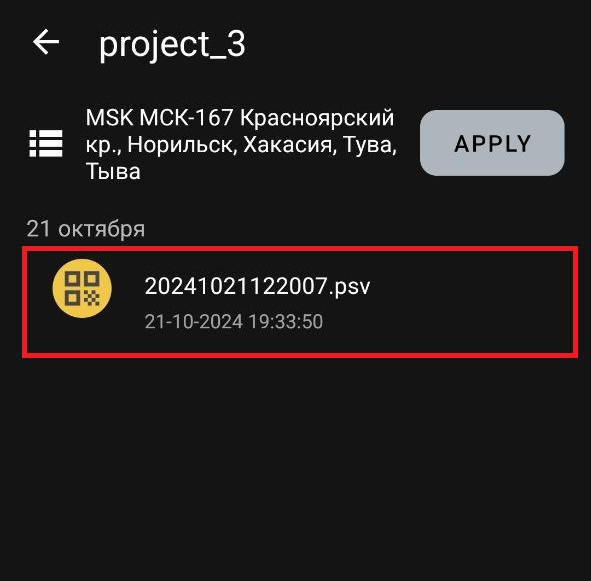
После того, как система координат будет добавлена, её можно применить к метаданным снимка. Для этого достаточно перейти в список с системами координат и нажать на нужную СК, затем перейти в проект и нажать кнопку «Применить» («Apply»).[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-16-04-47.jpg)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-16-04-47.jpg) [ 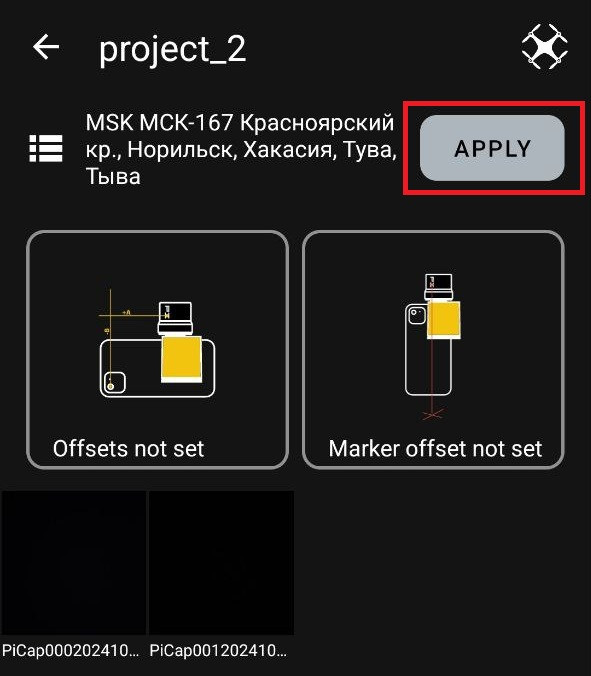](https://wiki.pidt.net/uploads/images/gallery/2024-10/photo-2024-10-24-16-03-39.jpg)
После применения СК к фотоснимками, вы можете импортировать проект в ПО Teobox для предобработки и экспорта в проект Metashape или Pix4D. Для более подробной информации о том, как импортировать фотоснимки, ознакомьтесь со статьёй [«Быстрый старт!»](https://wiki.pidt.net/books/picap/page/bystryi-start).
# Параметры смещений антенны и метки
В этой статье мы рассмотрим, как задать параметры смещений антенны и метки. Эти параметры важны для обеспечения высокоточной привязки фотоснимка к реальным координатам.
Для начала откройте приложение PiCap, которое можно скачать в Telegram канале ["Инфа и файлы PiGO PiDATA"](https://t.me/pifiles/268). Откройте ваш проект на главном экране, затем перейдите в раздел «Смещение антенны». Здесь вы сможете задать смещение антенны в трехмерном пространстве, используя следующие параметры:
dA — горизонтальное смещение по оси X.
dB — горизонтальное смещение по оси Y.
dC — вертикальное смещение по оси Z.
Нажмите кнопку сохранить для применения настроек.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/UqYantenna.png) [ 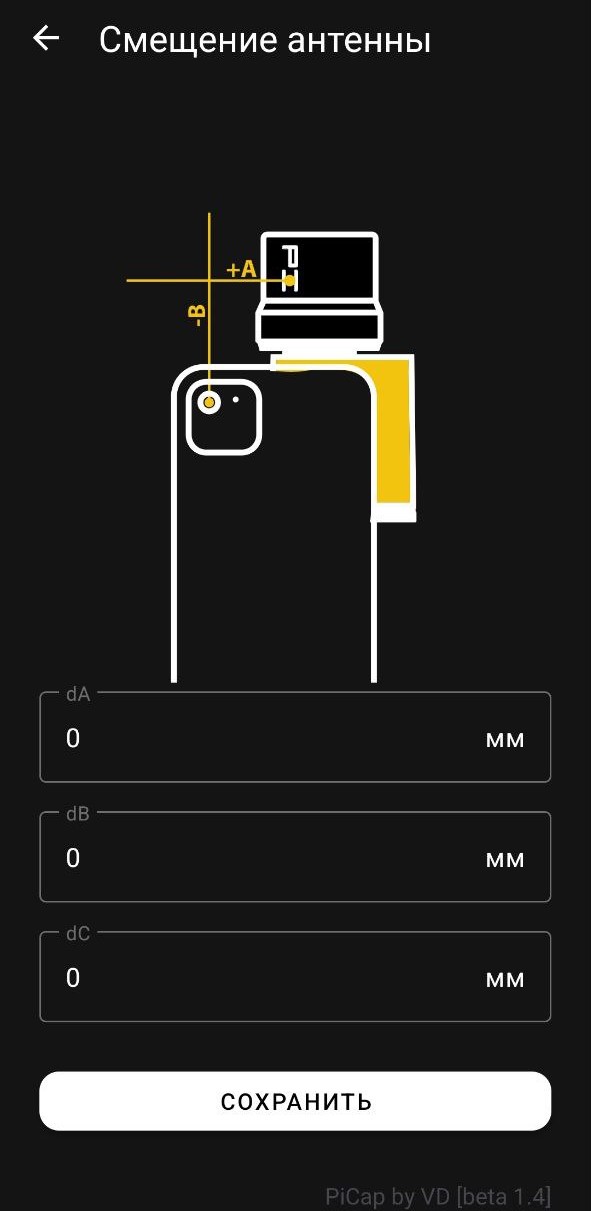](https://wiki.pidt.net/uploads/images/gallery/2024-10/scaled-1680-/3.jpg)
Затем перейдите в раздел «Смещение метки». Здесь вам необходимо задать параметр dH, который указывает на смещение метки. Далее нажмите кнопку сохранить для применения настроек.[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/j4Tmetka.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/j4Tmetka.png) [ 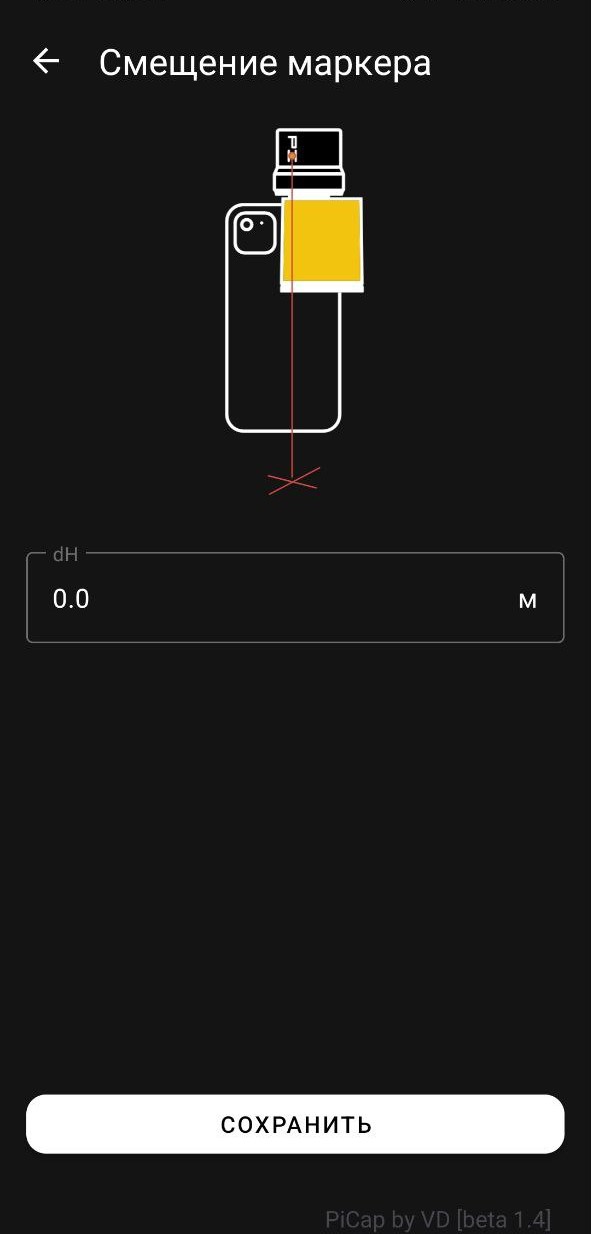](https://wiki.pidt.net/uploads/images/gallery/2024-10/4.jpg)
Поскольку антенна и объектив могут находиться на разных высотах и в разных точках, учёт смещения необходим для получения корректных координат.
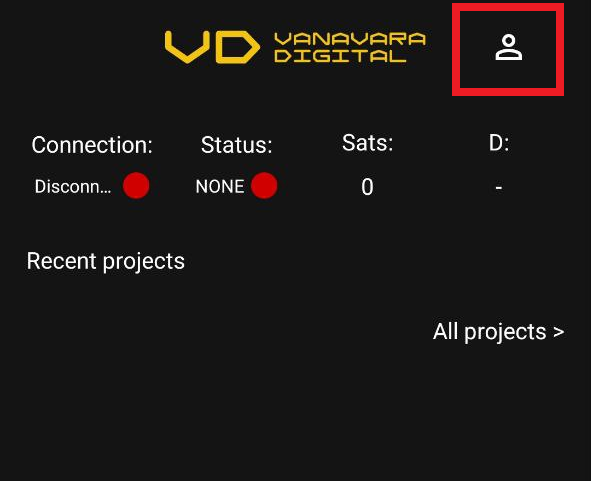
# Авторизация в сервисах PIDT.Net
Чтобы экспортировать проект из приложения PiCap в ПО Teobox, необходимо авторизоваться в сервисах PIDT.Net. Для этого перейдите на главный экран приложения и нажмите кнопку в правом верхнем углу.
[](https://wiki.pidt.net/uploads/images/gallery/2024-10/avtorizaciia.png)
Также вы можете пройти авторизацию при переходе в раздел съёмки. Откройте ваш проект на главном экране, затем перейдите в раздел съёмки по кнопке, выделенной на скриншоте ниже. После этого, вам нужно открыть раздел настроек и нажать кнопку "Пожалуйста, авторизуйтесь".[ ](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera.png)
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-10/kamera.png) [ 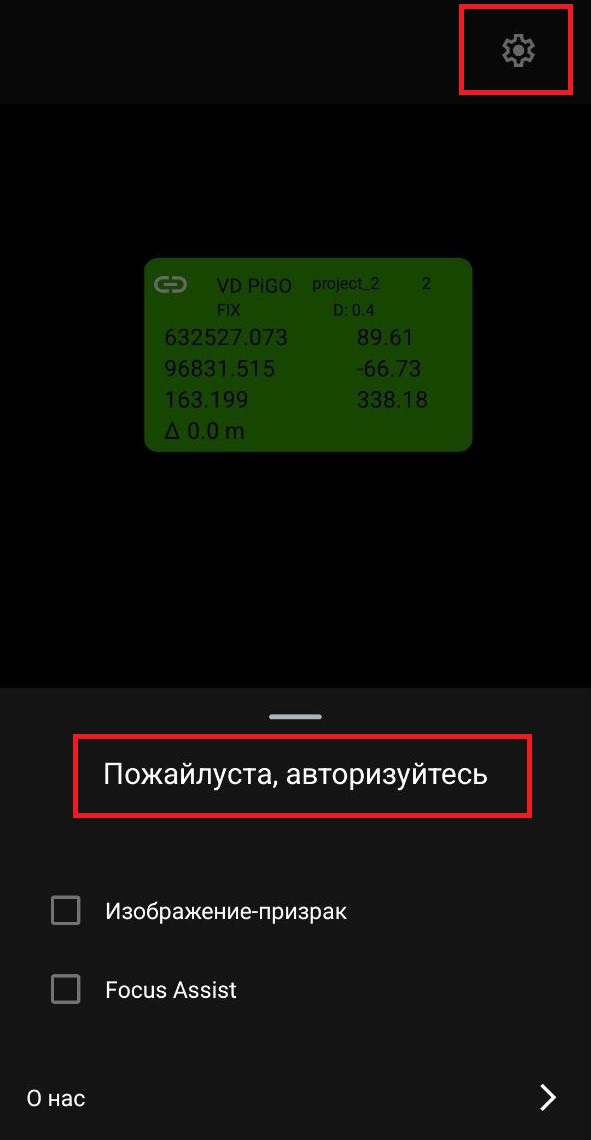](https://wiki.pidt.net/uploads/images/gallery/2024-10/scaled-1680-/Zdrphoto-2024-10-24-17-34-17.jpg)
Введите в соответствующие поля логин и пароль от бота [PiDATA User Bot](https://t.me/pi2r2bot) и нажмите кнопку "Войти". Далее вы получите код от бота [PiDATA User Bot](https://t.me/pi2r2bot), который нужно будет ввести в поле и отправить. После успешной авторизации появится ваш профиль. [ ](https://wiki.pidt.net/uploads/images/gallery/2024-08/Yi7image.png)
[ 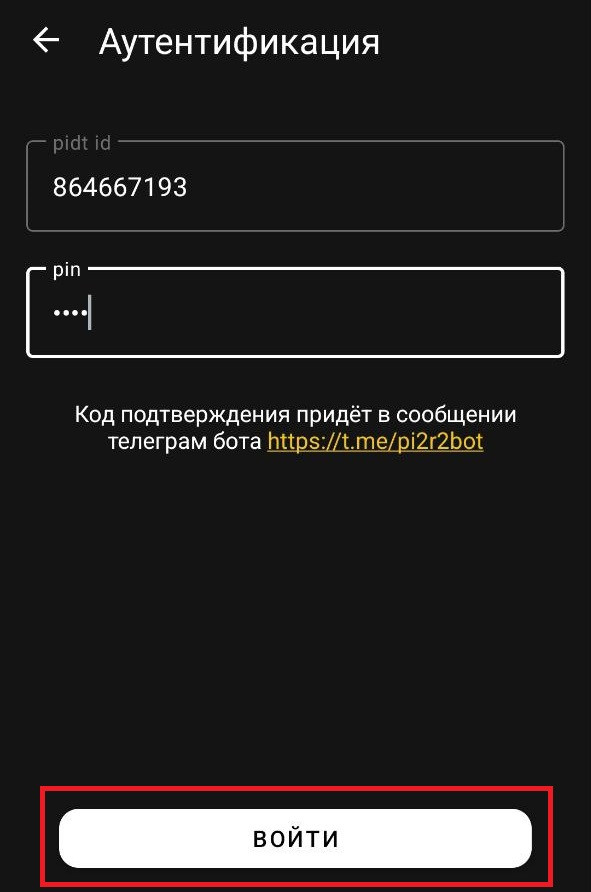 ](https://wiki.pidt.net/uploads/images/gallery/2024-08/scaled-1680-/Yi7image.png) [ 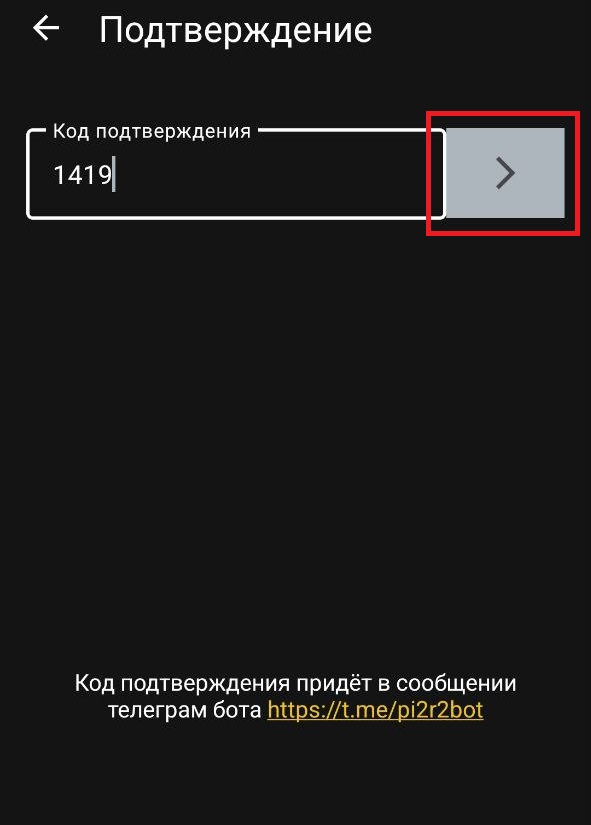](https://wiki.pidt.net/uploads/images/gallery/2024-08/scaled-1680-/ZeNimage.png)
После авторизации отобразится ваш профиль и функция экспорта станет доступной.
# Что доступно в Пикапе по подписке
Наполяем инфу о доступных опциях в платной версии PiCap для Андроида