PiSLAM - новая геодезия
- PiSLAM OME
- Быстрый старт!
- Инструкция по эксплуатации beta версии сканера PiSLAM
- Сканирование в помещениях
- PiVO - плагин для картограммы в CC
PiSLAM OME
Ключевые возможности
1. Дальность качественного сканирования: до 25 метров.
2. Продолжительность одного сканирования: до 40 минут (рекомендуется не превышать 25 минут для оптимального результата).
3. Плотность облака точек: высокая (обеспечивает детализированное 3D-представление объектов и ландшафта).
4. Точность результата: напрямую зависит от точности вашей опоры.
Комплектация
- Лидар PiSLAM OME
- Кабель питания USB Type-C
- Защитная сумка для транспортировки
- Аккумулятор PiTatel (22 Вт) — в подарок!
Технические характеристики
- Вес: всего 400 г (без аккумулятора)
- Размеры: 65 × 65 × 85 мм (без антенны)
- Степень защиты: ip54 — устойчив к пыли и брызгам воды
- Рабочий температурный диапазон: от –20 °C до +45 °C
- Корпус: алюминиевый
- Крепление: стандартный разъём 1/4"

PiSLAM OME — это идеальный инструмент для инженеров, геодезистов, архитекторов и специалистов, которым нужен лёгкий, автономный и высокопроизводительный лидар. Компактность не в ущерб функциональности — теперь точное 3D-сканирование доступно в карманном формате.
В чате @PiSlam активно обсуждаются характеристики и практическое применение устройства. @Инфа и файлы официальный Telegram канал компании Vanavara Digital, который поможет вам быть в курсе последних новостей и разработок.
Быстрый старт!
В данной статье пойдет речь про использование сканера PiSlam, про тонкости работы с ним а также про элементы управления.
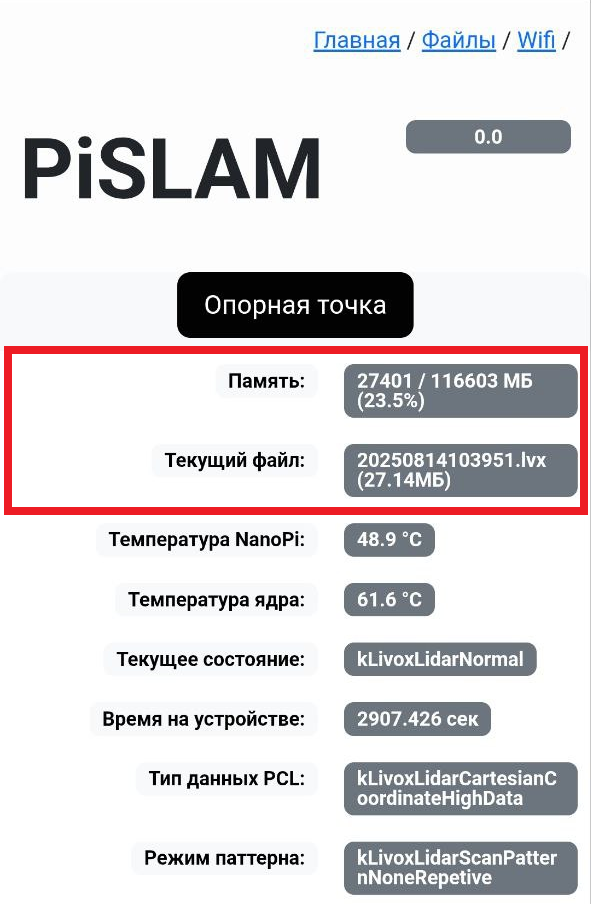
При подаче питания устройство издаст звуковой сигнал и создаст точку доступа под названием PiSLAMOME. Подключаемся к ней, пароль: 12345678. Далее переходим в веб браузер и заходим на веб интерфейс, адрес - 192.168.10.1. Попадаем на веб интерфейс управления:
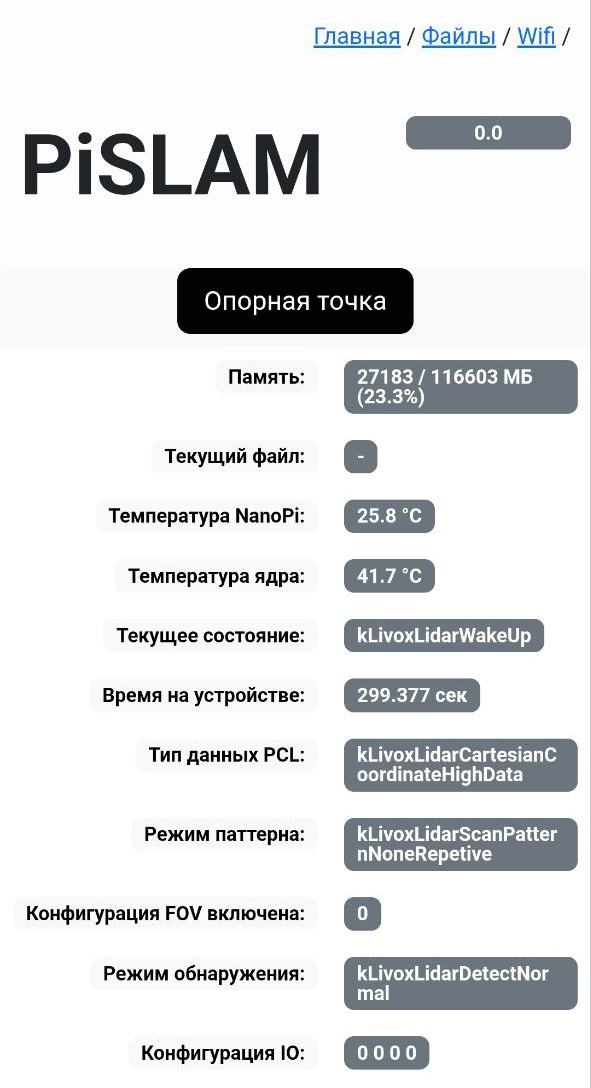
Опции доступные на главном экране:
1. Запуск мотора лидара.
Запускает мотор.
2. Остановка мотора.
Отключает мотор.
3. Запись файла.
Запускает мотор, начинает сканировать.
4. Остановка записи файла.
Отключает мотор и заканчивает сканировать.
5. Чувствительный режим.
Включает режим повышенной чувствительности. Нужен для сканирования слабо отражающих объектов, например угля.
ОСТОРОЖНО! Эта опция в обычных условиях увеличивает количество шумов.
6. Обычный режим.
Выключает режим повышенной чувствительности.
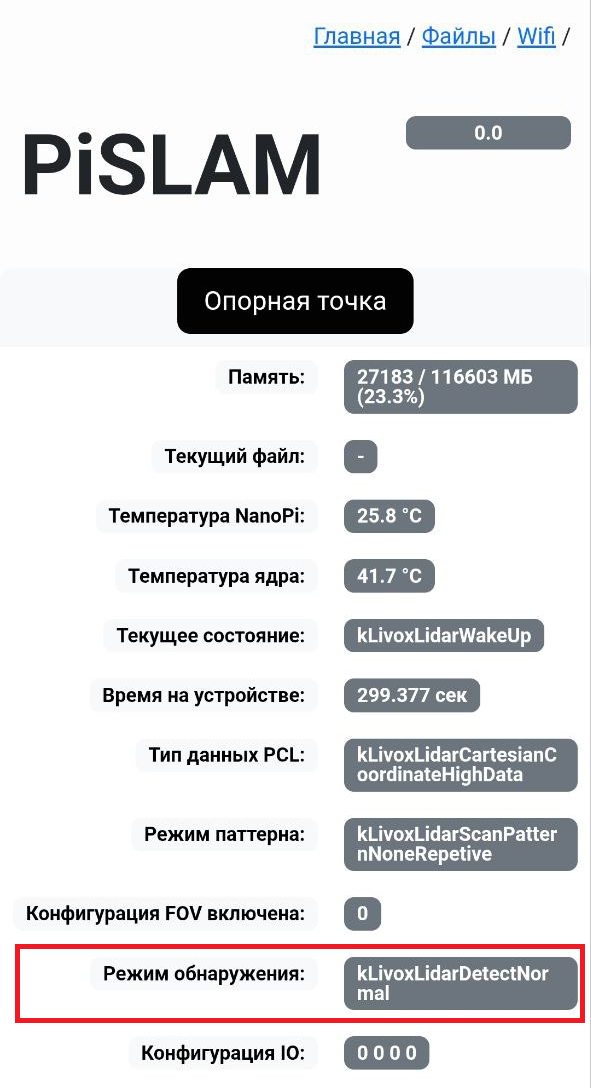
Текущий активный режим отображается в статусе «режим обнаружения» на главном экране.
- kLivoxLidarDetectNormal - обычный режим
- kLivoxLidarDetectSensitive - чувствительный режим
Запуск сканирования
Нажмите кнопку «Начать запись» — это запустит одновременно запись данных и мотор лидара. Сканирование начнётся автоматически.
Обязательно проверьте что файл начал писаться! Старт можно считать успешным если на главном экране:
1. Отобразилось название файла и его размер.
2. Значения занятой памяти увеличиваются.
Тонкости сканирования:
1. После нажатия на кнопку «Начать запись» сканер должен не менее 10 секунд находиться в неподвижном состоянии. Это требуется для улучшения позиционирования сканера в пространстве.
2. Сканер не любит резких движений. Старайтесь избежать сильной тряски, не бегайте и не прыгайте со сканером.
3. Не оставляйте сканер без объектов сканирования во время записи. Если вокруг сканера нет точек - то есть вероятность что алгоритм обработки не справится с вашими данными. Направьте сканер на землю и переходите к следующему объекту.
4. Не сканируйте большие движущиеся объекты. Если рядом с вами проезжает автобус или другая большая машина - остановитесь и подождите пока она проедет. Одновременное движение испортит ваш скан.
5. Закольцовывание не требуется.
Скачивание файлов:
Вы отсканировали объект и теперь нужно скачать файлы сканов. Для этого переходим во вкладку "Файлы". Вот так она выглядит:
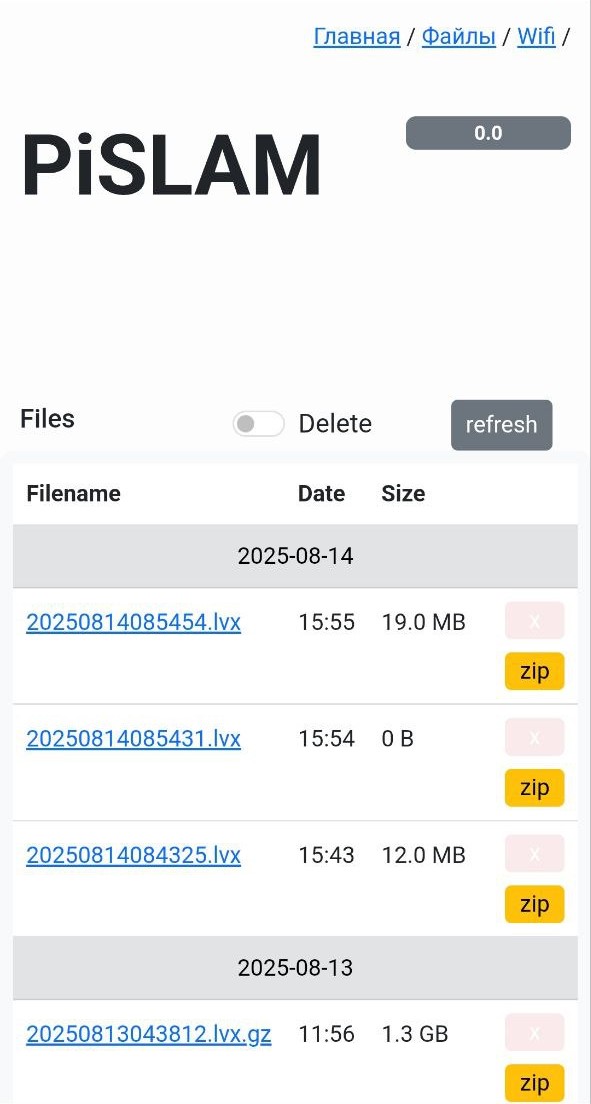
Для того чтобы скачать файлы вам нужно:
1. Для удобства скачивания, предусмотрена опция архивирования данных - желтая кнопка напротив каждого файла. Процесс не быстрый, но можно архивировать сразу несколько файлов. Refresh нажимать постоянно не нужно, список сам обновляется.
2. После окончания архивирования в списке появятся новые файлы: filename.zip. Скачать их можно нажав на название файла. (если браузер не начинает скачивание сразу, жалуясь на то что файл может быть небезопасным, правой кнопкой нажимаем на файл и нажимаем сохранить).
3. Для удаления файлов нажмите на ползунок Delete. Напротив каждого файла станет доступна кнопка удаления.
УДАЧНЫХ СКАНОВ!
Инструкция по эксплуатации beta версии сканера PiSLAM
Данная инструкция предназначена для обеспечения корректного и высококачественного сканирования при использовании сканера PiSlam. Следуя рекомендациям, вы сможете минимизировать ошибки позиционирования и повысить точность получаемых данных.
Требования к процессу сканирования
1. Стабильное начало записи
После нажатия кнопки «Начать запись» удерживайте сканер неподвижно как минимум 15 секунд — независимо от наличия опознавательных меток. Это обеспечит более точное позиционирование устройства в пространстве.
2. Плавные движения
Избегайте резких движений, тряски, бега или прыжков во время сканирования. Сканер чувствителен к динамическим нагрузкам — плавное и равномерное перемещение способствует более стабильному построению облака точек.
3. Постоянное наличие объектов в поле зрения
Не допускайте длительного отсутствия объектов в зоне сканирования. Пустые пространства (например, при направлении сканера в небо) могут привести к потере ориентации алгоритма. Рекомендуется направлять сканер на землю или близлежащие поверхности при переходе между объектами.
4. Сканирование в условиях движения крупных объектов
Избегайте сканирования при проезде крупногабаритного транспорта (автобусы, грузовики и т.п.). Одновременное движение сканера и крупного объекта может исказить результат. Остановитесь и дождитесь, пока объект покинет зону сканирования.
5. Закольцовывание траектории
Возвращение в начальную точку (закольцовывание) не требуется — система не зависит от замкнутой траектории.
6. Точка начала скана - всегда является опорной
При начале сканирования всегда нужно ставить опорную точку в начале скана.
7. Количество координат опорных точек должно совпадать с количеством нажатий на кнопку "опорная точка"
Каждое нажатие на кнопку "опорная точка" должно сопровождаться координатами, где это нажатие было совершено, ни больше ни меньше.
8. Стоять на месте установки опорной точки нельзя более 10 секунд. Подходя к опорной точке, убедитесь что у приёмника есть фиксированное решение.
НЕПРАВИЛЬНЫЙ Пример: перед тем, как вы хотели поставить опорную точку, потерялся фикс на приёмнике. Вы ставите сканер и ждёте фикс, после его появления вы ставите точку и идёте дальше (итого секунд 20-30 на месте установки опорной точки).
ПРАВИЛЬНЫЙ Пример: потерялся фикс перед тем, как вы хотите поставить опорную точку. Вы должны дождаться фикса, пройти НЕ МЕНЬШЕ двух метров в сторону, поставить опорную точку, пойти дальше.
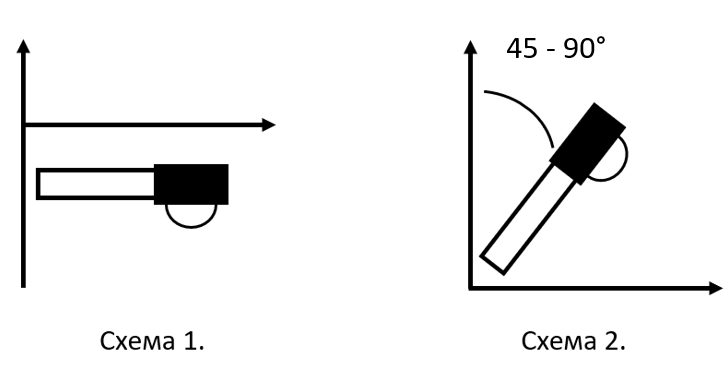
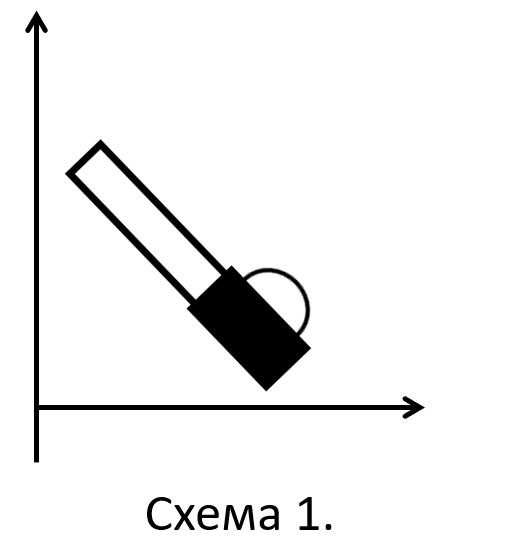
Выбор положения лидара
Ручка лидара должна располагаться сзади по направлению движения оператора. Это предотвращает появление «шлейфа» — артефактов, вызванных засветкой самого оператора в облаке точек. Правильное положение лидара обеспечивает корректную работу цилиндрической модели фильтрации шумов.
Схема 1 — положение сканера при съёмке рельефа. Высота объектов до 5 метров.
Схема 2 — положение сканера при съёмке вертикальных объектов. Высота объектов до 15 метров.
Использование опознавательных знаков (опознаков)
Для повышения точности и надёжности результатов рекомендуется заранее спланировать маршрут и разместить контрольные и опорные знаки.
Опорные знаки служат основой для геометрической привязки и коррекции траектории сканирования.
Требования:
1. Количество опорных знаков— не менее 6. Опорный знак это точка, на которую нужно установить сканер и зафиксировать его без движения на 6+ секунд.
2. Максимальное расстояние между соседними опорными знаками — 40 метров (по траектории движения).
3. Не размещайте опознаки слишком близко друг к другу — это может привести к эффекту "задвоения" точек, если опоззнаки закоординированы с ошибкой или сканер установлен на них со смещением.
Важно: система PiSlam сильно зависит от опорных знаков. Их неправильное размещение может существенно повлиять на качество скана.
Контрольные знаки используются для последующей проверки точности полученных данных. Контрольным знаком может быть любая точка, хорошо различимая в облаке, например, автомобильный знак, лежащий на земле.
Рекомендации:
1. В качестве контрольных знаков предпочтительно использовать дорожные знаки — они хорошо выделяются по интенсивности в готовом облаке точек.
2. Для эффективного контроля точности, размещайте контрольные знаки между опорными, особенно в зонах с высокой сложностью рельефа или застройки.
Схемы размещения опознаков и траектории движения
- Опорные знаки(О)
Схема 1. Петля без опорного знака
Небольшая петля в траектории (вне зоны видимости в 35 метров от других опознаков), не зафиксированная опорным знаком, может привести к значительной ошибке в этой петле.
Решение: размещайте опорные знаки в каждой петле или возвратной части маршрута, а также в крайних точках сканируемой области.
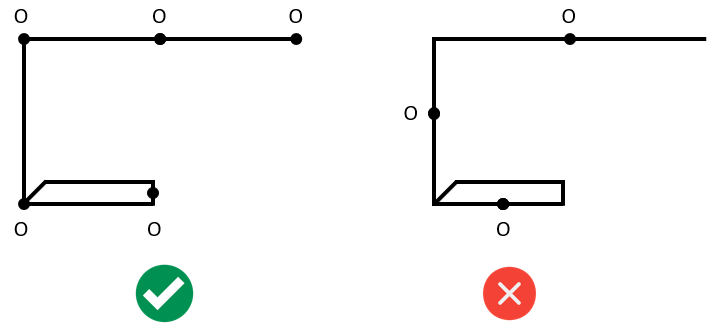
Рисунок к схеме 1
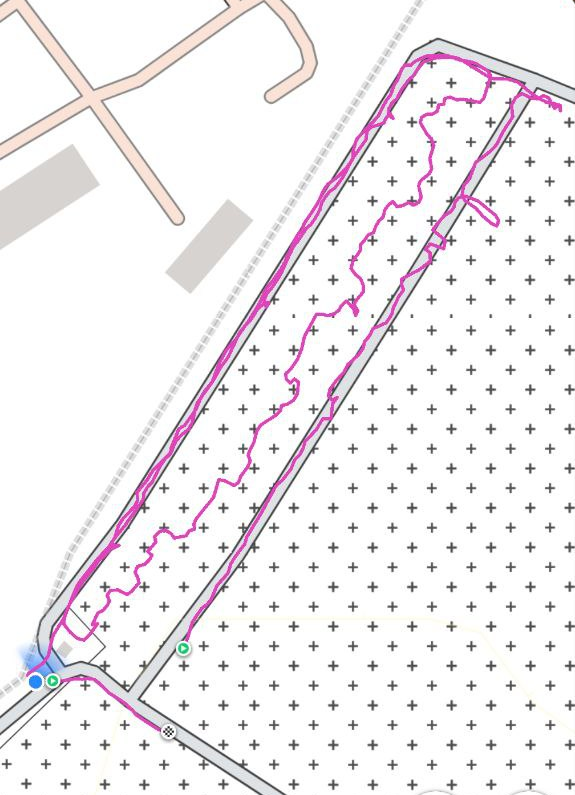
Схема 2. Линейное размещение опознаков
Не располагайте опорные знаки в одну линию. Это приведет к скручиванию результирующего скана.
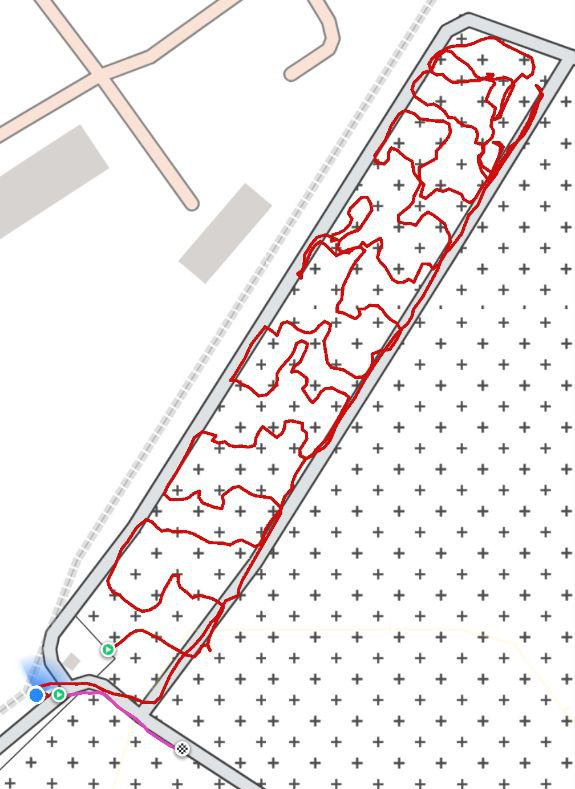
Решение: при сканировании линейных объектов (дороги, трассы) делайте отходы в сторону (рекомендуемая длина — 20 метров) с установкой опорных знаков.
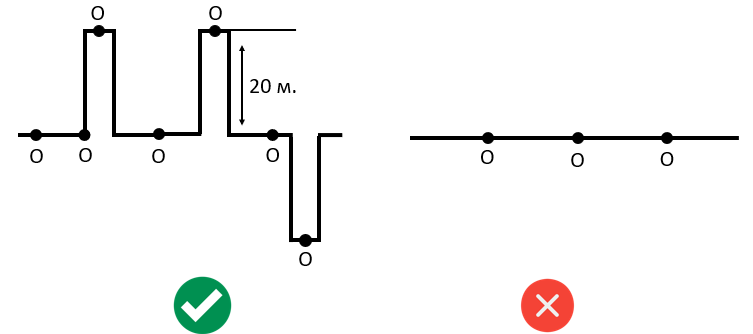
Рисунок к схеме 2
Схема 3. Галсы (проходы туда-обратно)
Расстояние между параллельными галсами не должно превышать 25 метров. При большом удалении возможно образование зон с низкой плотностью точек и потерей детализации.
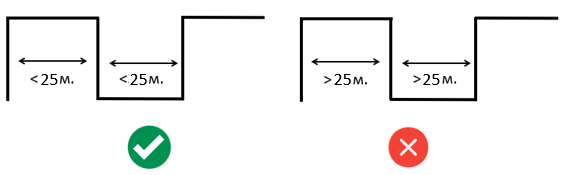
Рисунок к схеме 3
Схема 4. Петля вне зоны видимости
Если между двумя участками траектории, образующими петли, отсутствует прямая видимость (например, из-за ограждения), система не сможет корректно установить пространственную связь между ними.
Решение: в каждом из замкнутых участков (петель), разделённых препятствием, обязательно устанавливайте опорные знаки.

Рисунок к схеме 4
ТАК НЕЛЬЗЯ !!!!!!!!!!!!!!!!
ТАК СУПЕР !!!!!!!!!!!!!!!!!!
Соблюдение данных рекомендаций позволит получить качественное, точное и надёжное облако точек даже на этапе использования бета-версии сканера PiSlam. Обратите особое внимание на подготовку маршрута и размещение опознаков — это ключевые факторы успеха сканирования.
Сканирование в помещениях
Выбор положения лидара
Для корректной работы сканера в помещениях необходимо правильно установить положение лидара:
Схема 1 — направление вверх:
Установите сканер так, чтобы ручка была направлена вверх. Это положение рекомендуется при сканировании помещений с высокими потолками или при необходимости захвата верхней части пространства. Убедитесь, что корпус сканера надёжно зафиксирован и не подвержен вибрациям во время перемещения.
Схемы траектории движения
Ниже приведены рекомендации по обходу различных типов помещений.
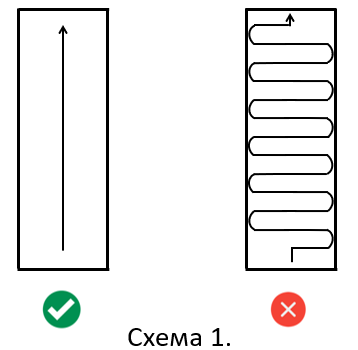
Схема 1 — Обход коридора шириной до 10 метров.
При сканировании узких или средних коридоров (шириной до 10 м) следует двигаться строго по прямой линии вдоль оси коридора.
Не рекомендуется использовать «ходьбу змейкой» — это может привести к избыточному перекрытию сканов, увеличению шума и снижению точности реконструкции. При необходимости изменить направление движения выполняйте плавные, медленные повороты.
PiVO - плагин для картограммы в CC
VD PiVO — это плагин для программы CloudCompare, предназначенный для обработки результатов расчёта объемов и формировании итоговой картограммы в формате pdf.
Инструкция по установке
1. Установка
- Скачать установщик можно по ссылке с поста https://t.me/pifiles/737.
-
Необходимо закрыть CloudCompare, если программа запущена (во время установки CloudCompare должен быть полностью закрыт).
-
Установка происходит через установщик PiVO_Installer.exe, после следования его шагов, он установится.
Инструкция по использованию плагина
1. Подготовка облака объема
-
В CloudCompare должны быть загружены:
-
два облака точек (до и после работ),
-
граница участка (polyline из .dxf файла).
-
-
Выделив оба облака точек в верхнем меню нужно выбрать:
Сервис → Объем → Вычислить объем 2.5D
или в английской версии:
Tools → Volume → Compute 2.5D Volume
-
В открывшемся окне Volume Calculation:
- задав необходимые параметры нужно выполнить расчет объема.
-
После завершения нажать:
-
Export grid as a cloud
-
В дереве объектов появится новое облако с названием Height difference raster.
2. Работа с плагином VD PiVO
-
После расчета облака Height difference raster в дереве объектов выделите два объекта:
-
облако Height difference raster,
-
облако земли (до работ).
-
-
Откройте плагин:
Plugins → VD PiVO
-
-
В появившемся окне Выбор границы области:
-
выберите polyline из списка, которые были импортированы из .dxf (если у polyline есть имя можно фильтром найти по нему),
-
нажмите OK.
-
-
Через несколько секунд появится окно выбора пути для сохранения результата.
-
Укажите место сохранения файла (пока путь сохранения не должен содержать кириллицу).
-
Спустя несколько секунд появится уведомление о результате обработки (успешно или с ошибкой).
-