Ручка лидара должна располагаться сзади по направлению движения оператора. Это предотвращает появление «шлейфа» — артефактов, вызванных засветкой самого оператора в облаке точек. Правильное положение лидара обеспечивает корректную работу цилиндрической модели фильтрации шумов.
Схема 1 — положение сканера при съёмке рельефа. Высота объектов до 5 метров. Схема 2 — положение сканера при съёмке вертикальных объектов. Высота объектов до 15 метров. [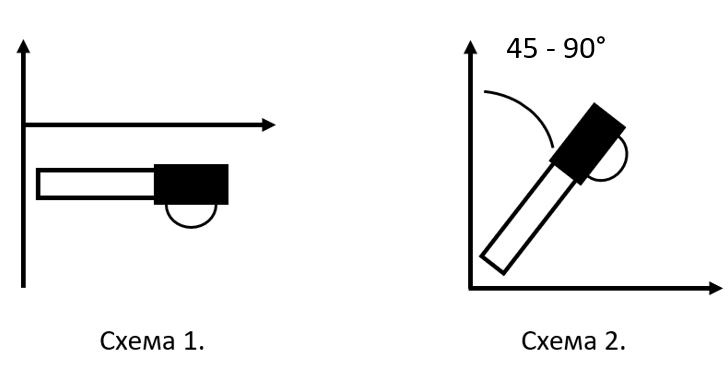](https://wiki.pidt.net/uploads/images/gallery/2025-10/0AAimage.png) ##### Использование опознавательных знаков (опознаков) Для повышения точности и надёжности результатов рекомендуется заранее спланировать маршрут и разместить контрольные и опорные знаки. Опорные знаки служат основой для геометрической привязки и коррекции траектории сканирования. Требования: 1. Количество опорных знаков— не менее 6. Опорный знак это точка, на которую нужно установить сканер и зафиксировать его без движения на 6+ секунд. 2. Максимальное расстояние между соседними опорными знаками — 40 метров (по траектории движения). 3. Не размещайте опознаки слишком близко друг к другу — это может привести к эффекту "задвоения" точек, если опоззнаки закоординированы с ошибкой или сканер установлен на них со смещением.Важно: система PiSlam сильно зависит от опорных знаков. Их неправильное размещение может существенно повлиять на качество скана.
Контрольные знаки используются для последующей проверки точности полученных данных. Контрольным знаком может быть любая точка, хорошо различимая в облаке, например, автомобильный знак, лежащий на земле. Рекомендации: 1. В качестве контрольных знаков предпочтительно использовать дорожные знаки — они хорошо выделяются по интенсивности в готовом облаке точек. 2. Для эффективного контроля точности, размещайте контрольные знаки между опорными, особенно в зонах с высокой сложностью рельефа или застройки. ##### Схемы размещения опознаков и траектории движения - Опорные знаки(О) **Схема 1. Петля без опорного знака** Небольшая петля в траектории (вне зоны видимости в 35 метров от других опознаков), не зафиксированная опорным знаком, может привести к значительной ошибке в этой петле. Решение: размещайте опорные знаки в каждой петле или возвратной части маршрута, а также в крайних точках сканируемой области. [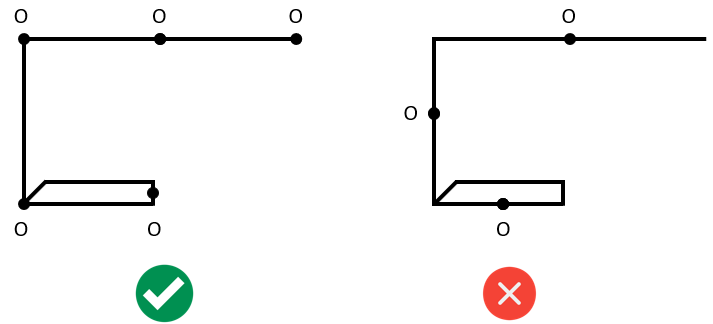](https://wiki.pidt.net/uploads/images/gallery/2025-08/DECimage.png) Рисунок к схеме 1 **Схема 2. Линейное размещение опознаков** Не располагайте опорные знаки в одну линию. Это приведет к скручиванию результирующего скана. Решение: при сканировании линейных объектов (дороги, трассы) делайте отходы в сторону (рекомендуемая длина — 20 метров) с установкой опорных знаков. [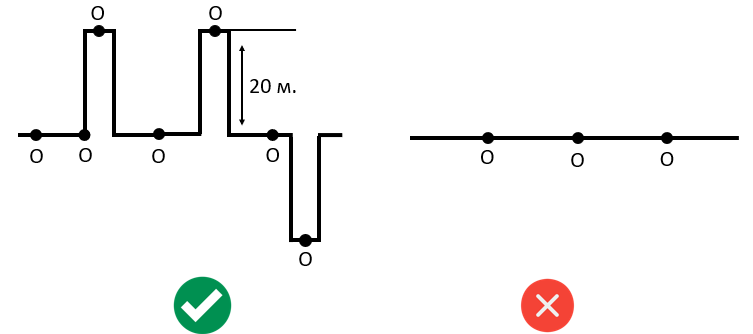](https://wiki.pidt.net/uploads/images/gallery/2025-08/P88image.png) Рисунок к схеме 2 **Схема 3. Галсы (проходы туда-обратно)** Расстояние между параллельными галсами не должно превышать 25 метров. При большом удалении возможно образование зон с низкой плотностью точек и потерей детализации. [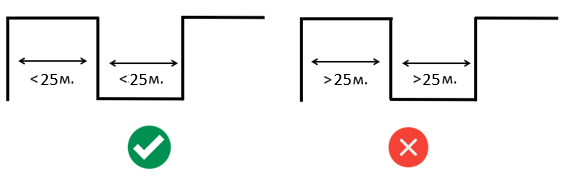](https://wiki.pidt.net/uploads/images/gallery/2026-03/lCYimage.png) Рисунок к схеме 3 **Схема 4. Петля вне зоны видимости** Если между двумя участками траектории, образующими петли, отсутствует прямая видимость (например, из-за ограждения), система не сможет корректно установить пространственную связь между ними. Решение: в каждом из замкнутых участков (петель), разделённых препятствием, обязательно устанавливайте опорные знаки. 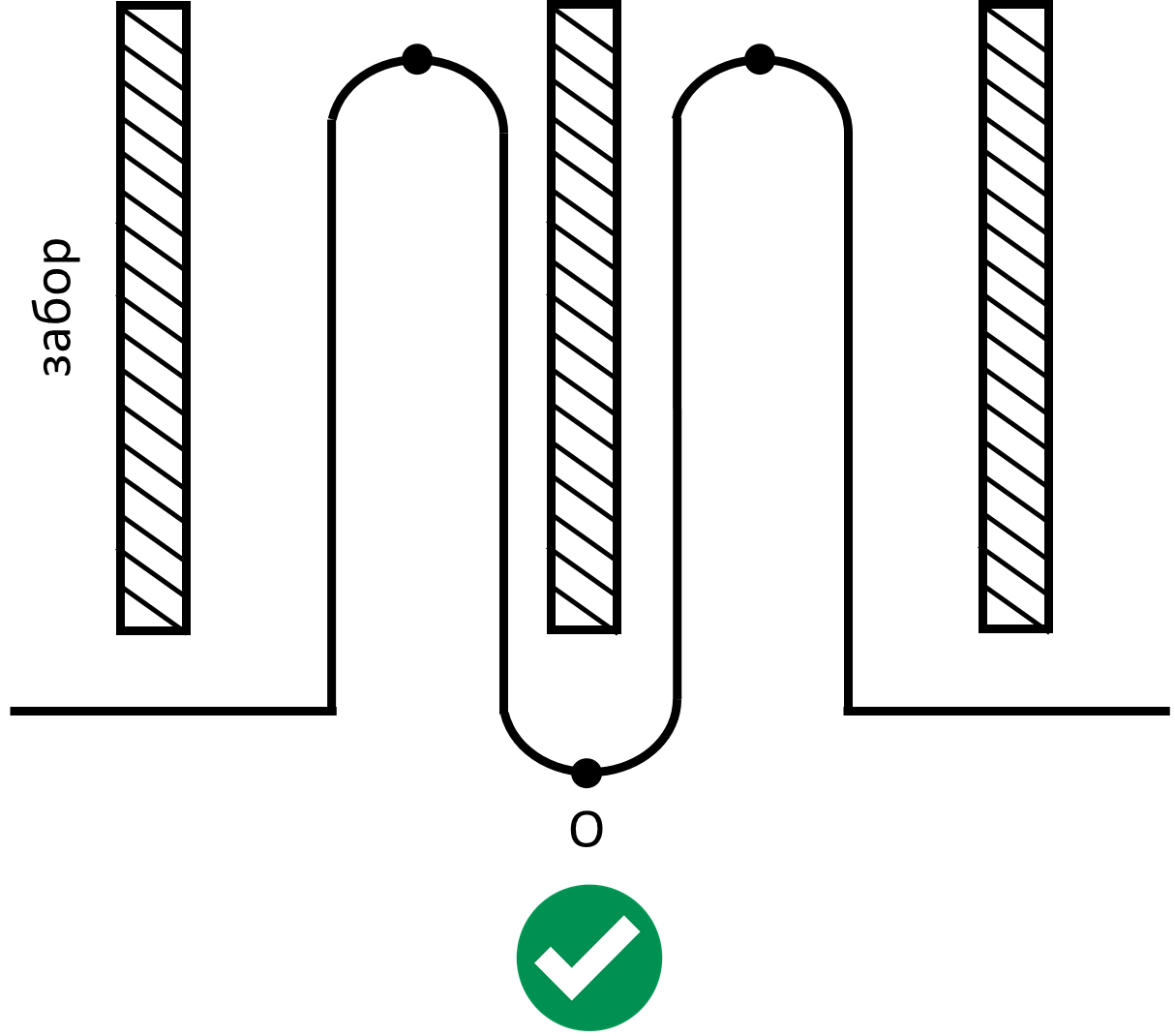 Рисунок к схеме 4 **ТАК НЕЛЬЗЯ !!!!!!!!!!!!!!!!** [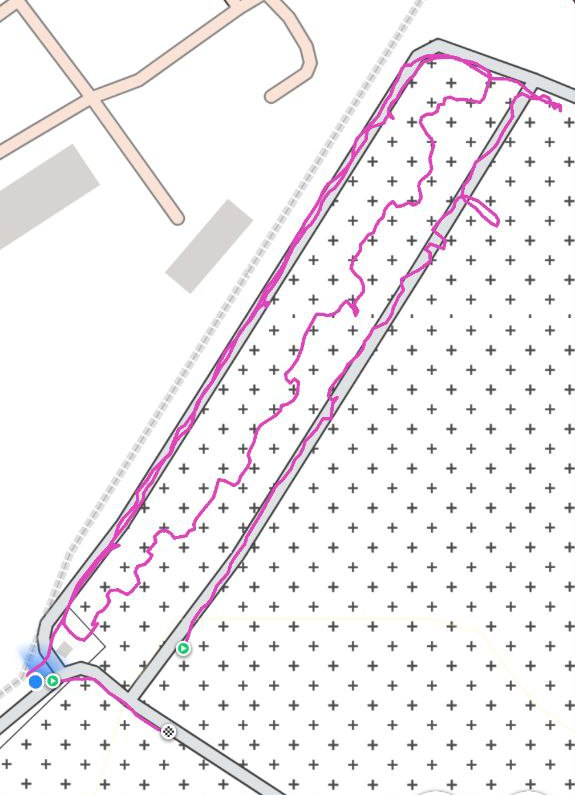](https://wiki.pidt.net/uploads/images/gallery/2025-09/image.png) **ТАК СУПЕР !!!!!!!!!!!!!!!!!!** [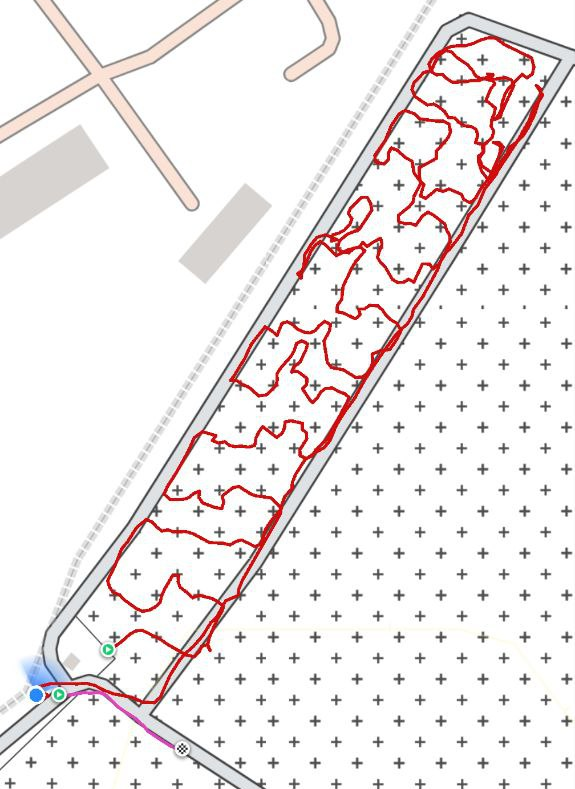](https://wiki.pidt.net/uploads/images/gallery/2025-09/IvCimage.png) Соблюдение данных рекомендаций позволит получить качественное, точное и надёжное облако точек даже на этапе использования бета-версии сканера PiSlam. Обратите особое внимание на подготовку маршрута и размещение опознаков — это ключевые факторы успеха сканирования.