Проект находится в разработке! В статье ["Проекты от VD"](https://wiki.pidt.net/books/proekty-vanavara-digital/page/proekty-vd) вы можете отслеживать на какой стадии находится проект.
 ##### Характеристики| Метрологические характеристики: - РТК: 1-5-10 Гц - PPK/StopGO: 10 Гц - Статика: 1-5-10 Гц - ГНСС: GPS, GLONASS, BEIDOU, GALILEO, QZSS, IRNS, SBAS - Сигналы: L1, L2, L5, B1, B2, B3, E1/E5a/E5b | Технические характеристики: - Питание: 5в от USB Type-C - Потребление: 3 ватта - Антенна: Beitian 300S - Вес: 500 грамм - Размер(без АКБ): 160 x 160 x 70 мм - Крепление: 5/8" + переходник на 1/4" |
Порядок включения подробно описан в статье ["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)[Порядок включения приёмника](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika). Как подключиться к web интерфейсу читайте в статье ["Порядок подключения к web интерфейсу"](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-podklyuceniya-k-web-interfeisu).
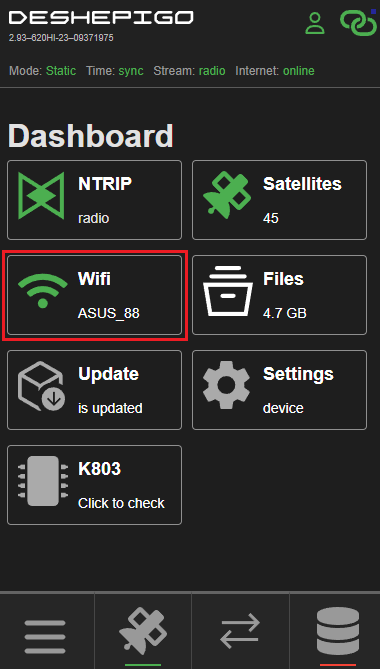
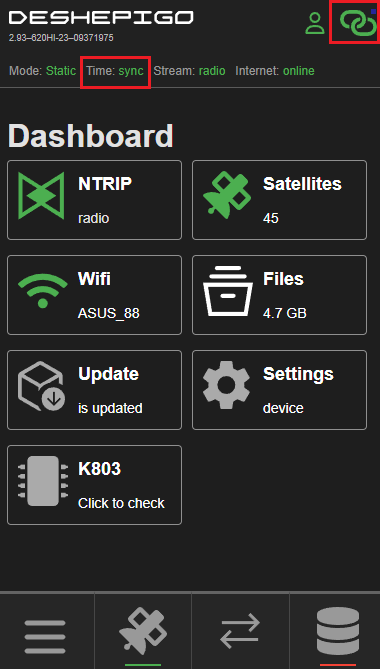
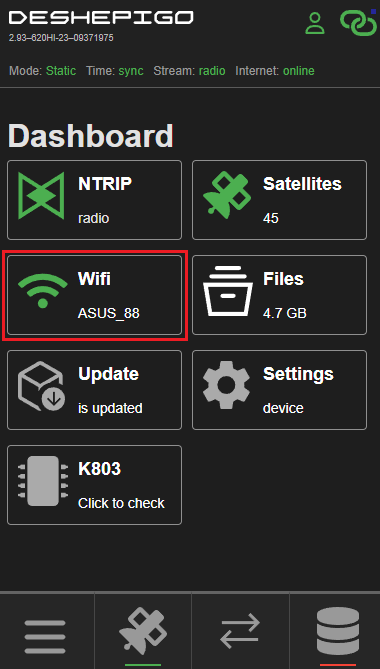
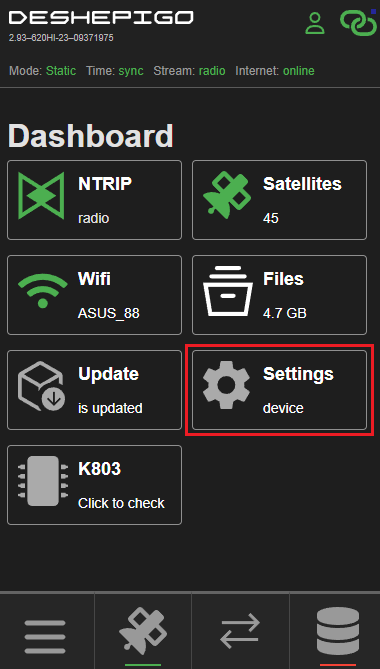
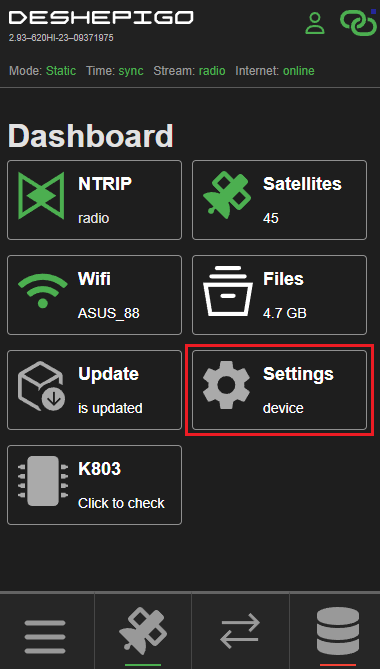
#### Навигация по web интерфейсу ##### 1. Главный экран На главном экране вы можете ознакомиться со статусами работы и разделами системы. Описание статусов: - Mode: текущий режим работы (Статика, Кинематика, Ровер). - Time: sync - синхронизировано время со спутниковым, not sync - не синхронизировано. - Stream: статус вещания. - Internet: наличие интернет соединения. Описание разделов: - Ntrip: отображает выбранный поток вещания. - Satellites: отображает количество спутников, которые видит приёмник. По нажатию на этот статус, вы можете перейти в раздел со спутниками. - Wifi: показывает подключенную сеть. По нажатию на этот статус, вы можете перейти в раздел с Wifi. - Update, Settings, Files, К803: кнопки для перехода в разделы обновления, настроек и записанных файлов. Панель быстрого доступа: 4 кнопки в нижней панели позволяют мгновенно перейти к нужным разделам: Главный экран, Спутники, Режимы работы, Файлы. На главном экране, сразу под логотипом, вы обнаружите информацию о версии и серийном номере вашего устройства, а также о версии прошивки модуля. (Пример со скриншота: 1.9 - версия устройства, 620HI-23 - прошивка модуля, 09371975 - серийный номер устройства.) На скриншоте красным цветом отмечен значок, который свидетельствует об успешном подключении. Если этот значок окрасится в красный цвет, это означает, что подключение к DeshePiGO не удалось. В том же поле находится мигающий квадратик, сигнализирующий о передаче статусов работы. Если этот квадратик перестанет мигать, это подразумевает, что произошла какая-то ошибка. [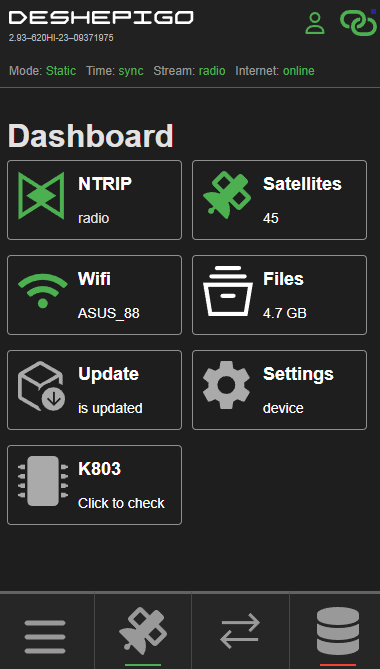](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-132655.png) ##### 2. Спутники В разделе "Satellites" вы можете просмотреть состояние спутников в виде столбцовой диаграммы. При необходимости, вы можете использовать фильтр для отображения определенных спутниковых группировок. Чтобы перейти в этот раздел, на главном экране нажмите на статус Satellites, либо на нижней панели нажмите на вторую кнопку. [ 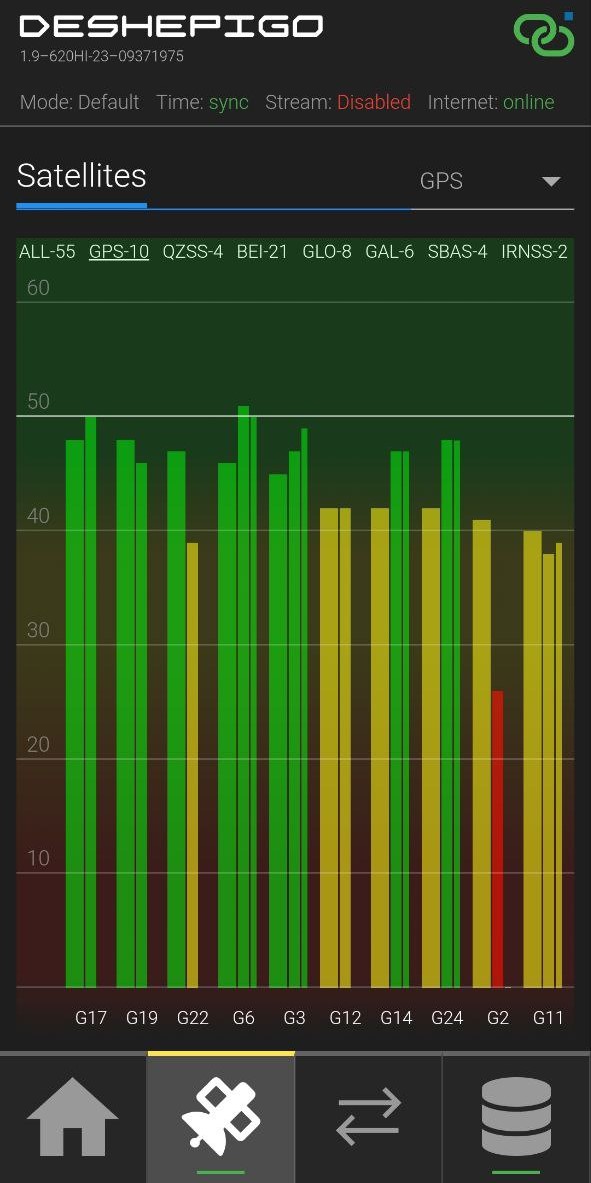 ](https://wiki.pidt.net/uploads/images/gallery/2024-02/sputniki.jpg)[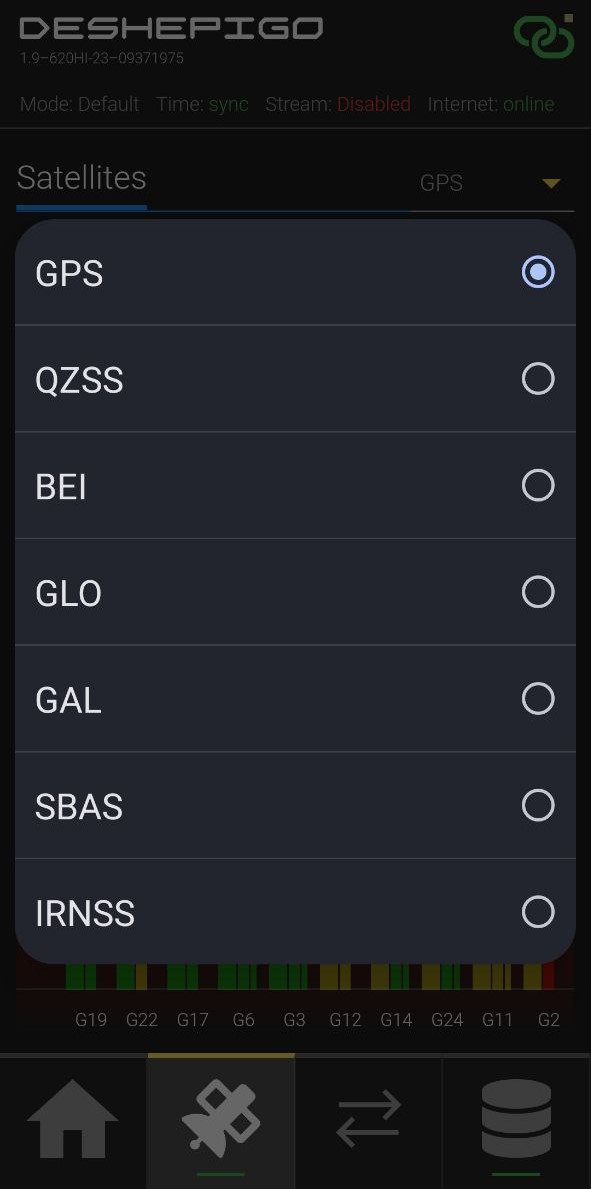](https://wiki.pidt.net/uploads/images/gallery/2024-02/sputniki1.jpg) ##### 3. Режимы работы приёмника Для начала записи данных статики или кинематики перейдите в раздел "Rover Mode", нажав третью кнопку на нижней панели. Здесь вы сможете активировать режимы [Статики ](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-static)и [Кинематики](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-stopgo-kinematic), а также использовать приемник в качестве [RTK Ровера](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-rtk-rover-s-ispolzovaniem-radiokanala-pidali). [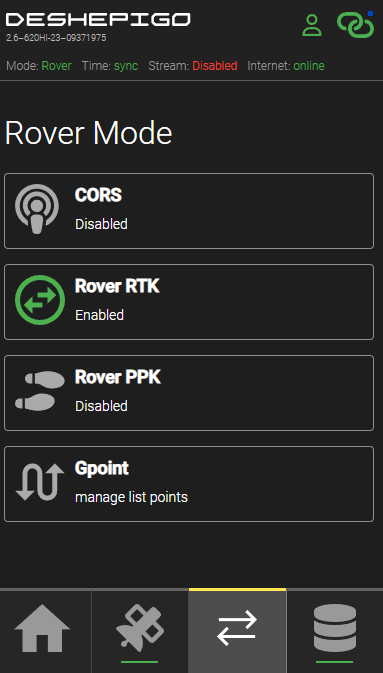](https://wiki.pidt.net/uploads/images/gallery/2024-05/snimok-ekrana-2024-05-18-134628.png) ##### 4. WI-FI Для обновления и скачивания файлов необходимо подключаться к Wi-Fi сети. Однако скачивание файлов также возможно в режиме точки доступа. Сохраненные сети можно удалить, а также посмотреть IP-адрес, который был присвоен устройству в момент последнего подключения. На скриншоте красным цветом выделена кнопка на главном экране, по которой можно перейти в данный раздел. Как подключиться к Wi-Fi сети читайте в статье ["Порядок подключения к web интерфейсу"](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-podklyuceniya-k-web-interfeisu).DeshePiGO не подключается к wifi сетям, имя которых содержат пробелы и русские буквы. Для Wi-Fi хотспота добавлена функция создания точек доступа на различных каналах, что станет особенно полезным для пользователей DJI дронов.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-11/BNtwifi.png)[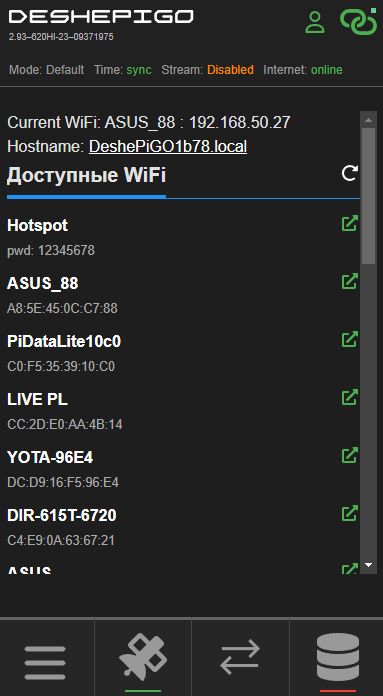](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-143754.png) ##### 5. Обновление В разделе “Update” вы можете обновить DeshePiGO до последней версии. При наличии новой версии web интерфейса, в разделе появиться кнопка обновления. Красным цветом выделана кнопка, по которой можно перейти в раздел с обновлениями. Порядок обновления подробно описан в статье ["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)[Порядок обновления приёмника](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-obnovleniya-deshepigo)["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika). [ 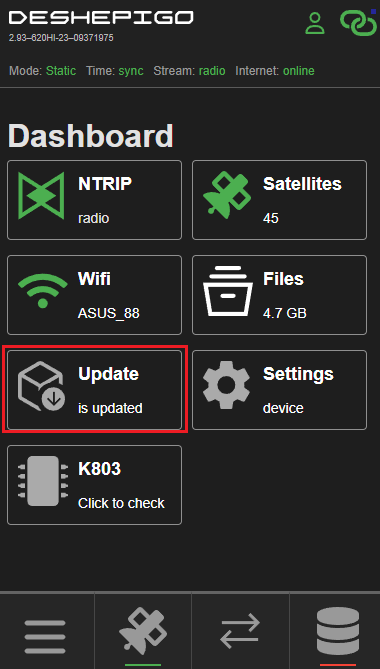 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/Lj6update.png)[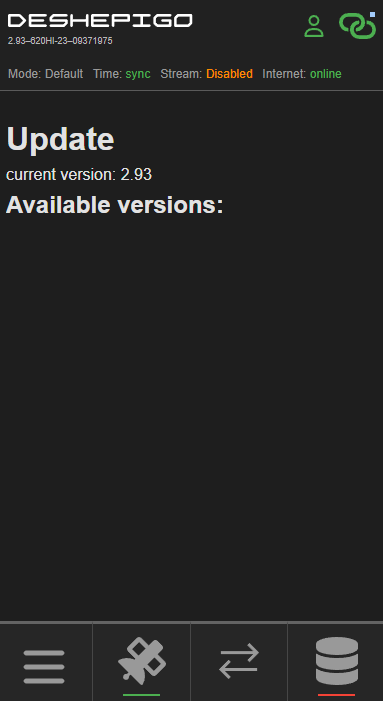](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-143932.png) ##### 6. Настройки Чтобы перейти в раздел с настройками нажмите кнопку "Settings" на главном экране. В разделе вы можете настроить такие параметры как: BLE options: Power - включает/отключает передачу данных по BLE. С помощью BLE, вы сможете подключиться к [7Star](https://wiki.pidt.net/books/poleznye-materialy-pofaily/page/7star-340) и использовать приёмник, как PiGO Lite. PPP options: Mode - включает/отключает режим PPP для работы с ГНСС-приемником без базовой станции в непосредственной близости от пользователя. Метод PPP отличается от стандартного Single решения повышенной точностью. Sorse - включает ГНСС сигналы Galileo has или Beidou b2b для получения высокоточных поправок. LoRa options: Mode - активирует работу приёмника в режиме PiDali. Power - настраивает мощность передачи модуля PiDali. Channel - настраивает частоту передачи модуля PiDali. Global options: Silent mode - отключает/включает звуковой сигнал во время записи статики. [ 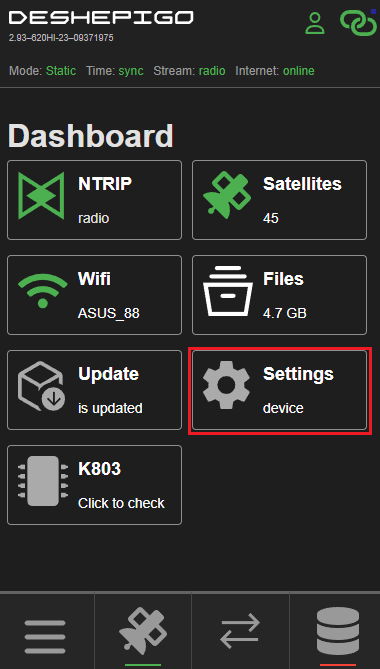 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/settings.png)[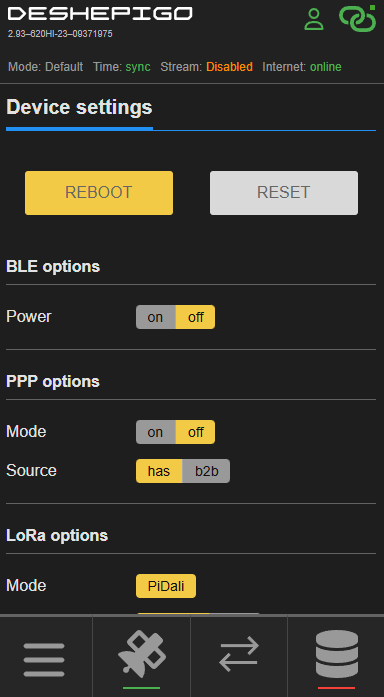](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-144129.png) ##### 7. Файлы В разделе "Files" вы можете скачивать файлы на ваш ПК или смартфон и удалять их с устройства. Ползунок Edit предназначен для удаления файлов. Вы можете удалять файлы выборочно, либо все сразу. Чтобы перейти в этот раздел достаточно нажать последнюю кнопку на нижней панели, либо на главном экране нажать кнопку "Files". [ 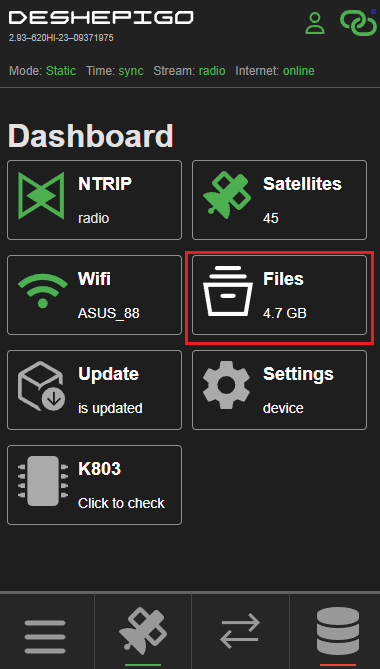 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/files.png)[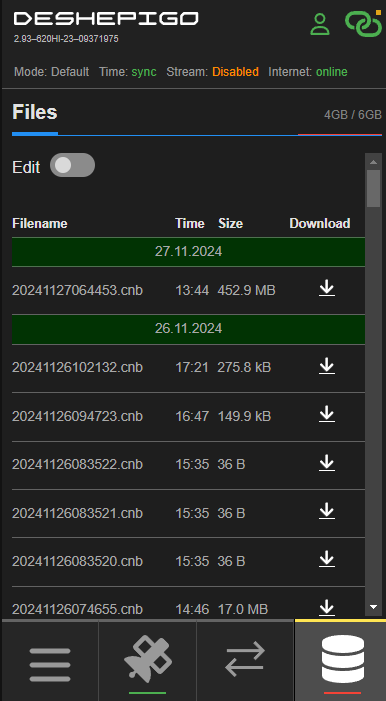](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-144354.png) ##### 8. Обновление модуля К803 В разделе "К803" вам доступны следующие возможности: просмотр текущей прошивки модуля К803 и ее обновление. Для этого достаточно выполнить простую последовательность действий. Сначала нажмите на кнопку "get updates from pidt" для просмотра новых версий модуля. Затем выберите желаемую версию и ответьте на уведомление для ее установки. Завершение обновления будет сопровождаться уведомлением об успешной установке и новым статусом прошивки. Перед обновлением проверьте подключение к WIFI сети. [ 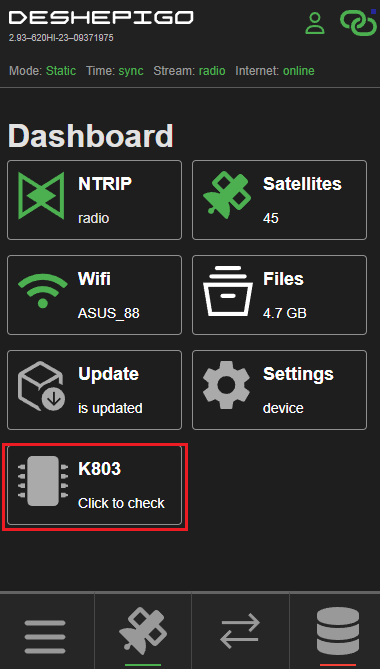 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/k803.png)[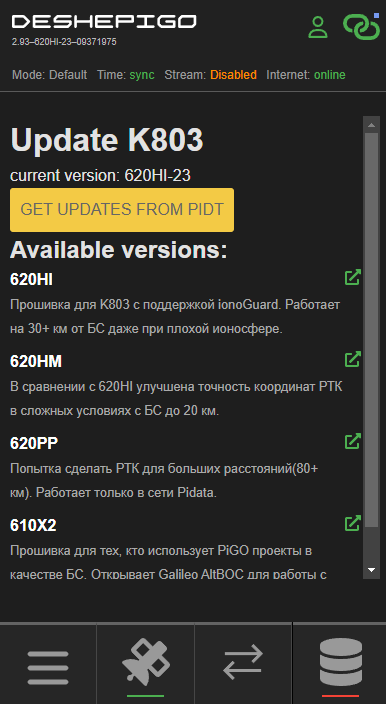](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-144531.png) Вы можете получить дополнительную информацию, задать вопросы, а также быть в курсе последних новостей и разработок в официальном Telegram чате [PiGo official](https://t.me/pigo_official). Заказать DeshePiGO вы можете в Telegram боте [PiSHOP](https://t.me/pishopbot). # Порядок включения приёмникаКак подключиться к web интерфейсу читайте в статье ["Порядок подключения к web интерфейсу"](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-podklyuceniya-k-web-interfeisu). Ознакомиться с возможностями web интерфейса вы можете в статье ["Быстрый старт!"](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-3zX).
[](https://wiki.pidt.net/uploads/images/gallery/2024-11/sync.png)Звуковые сигналы инициализации и подключение к wifi сети могут звучать в разном порядке, так как это два параллельных процесса.
# Порядок подключения к web интерфейсуОбратите внимание, что в названии точки доступа будут указаны уникальные 4 символа, которые в дальнейшем будут использоваться для подключения к веб интерфейсу! Запомните их или сохраните.
DeshePiGO не подключается к wifi сетям, имя которых содержат пробелы и русские буквы. Для Wi-Fi хотспота добавлена функция создания точек доступа на различных каналах, что станет особенно полезным для пользователей DJI дронов.
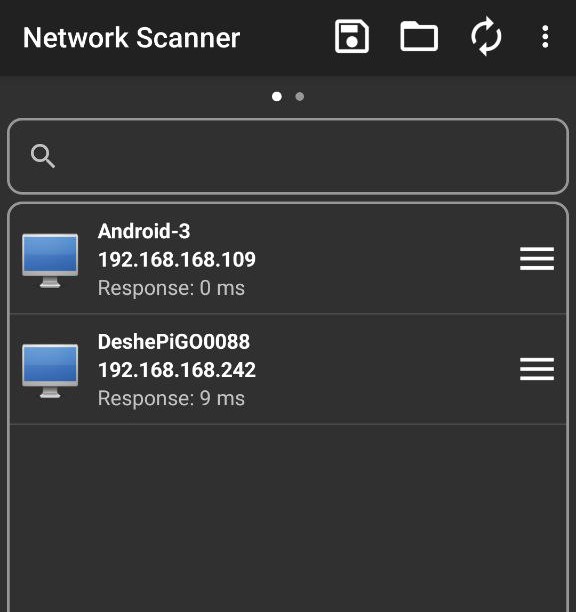
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-11/Zcmwifi.png)[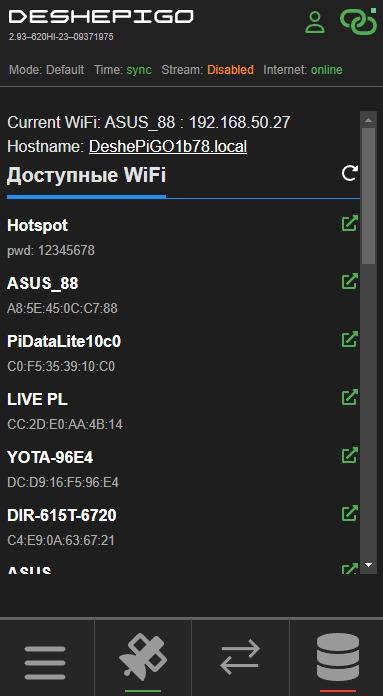](https://wiki.pidt.net/uploads/images/gallery/2024-11/RCvsnimok-ekrana-2024-11-28-143754.png) Примечание: Если адрес deshepigoхххх.local не работает, то перейдите по адресу вашего роутера и посмотрите какой ip адрес присвоен DeshePiGO или 5-тикратным коротким нажатием переведите DeshePiGO в состояние точки доступа, подключитесь к веб интерфейсу и перейдите в раздел Wi-Fi. В подразделе сохраненных Wi-Fi, указывается последний присвоенный в сети IP адрес, запомните его и снова подключите DeshePiGO к этой точке. Перейдите в эту сеть Wi-Fi, после этого зайдите на web интерфейс по IP адресу, запомненному ранее. Если вы услышите [звук ошибки соединения с wifi сетью](https://wiki.pidt.net/books/priemniki-pigopidata/page/zvukovye-signaly#bkmrk-4.-%D0%97%D0%B2%D1%83%D0%BA-%D0%BE%D1%88%D0%B8%D0%B1%D0%BA%D0%B8-%D1%81%D0%BE%D0%B5%D0%B4%D0%B8), то устройство не подключилось к выбранной Wi-Fi сети. Вероятно, вы ошиблись при вводе пароля. Устройство автоматически перейдет в режим точки доступа, если этого не произошло, то перейдите в режим точки доступа коротко нажав пять раз на кнопку питания. Затем снова подключитесь к точке доступа DeshePiGO. Удалите сохраненную точку и заново подключитесь к нужной Wi-Fi сети.Если вы не можете войти на веб интерфейс по имени deshepigoхххх.local, воспользуйтесь программой [Network Scanne](https://play.google.com/store/apps/details?id=com.myprog.netscan)r для отслеживания ip адреса. Пример работы программы представлен на скриншоте ниже.
[](https://wiki.pidt.net/uploads/images/gallery/2024-02/4lF1.jpg)В случае возникновения проблем поищите решение в статье [“Решение проблем”](https://wiki.pidt.net/books/priemniki-pigopidata/page/resenie-problem#bkmrk-%D0%9F%D1%80%D0%BE%D0%B1%D0%BB%D0%B5%D0%BC%D1%8B-%D1%81-%D0%BF%D0%BE%D0%B4%D0%BA%D0%BB%D1%8E%D1%87%D0%B5%D0%BD).
# Порядок обновления DeshePiGO 1. Включите приёмник. Включите приемник и дождитесь звука подключения к wifi сети. 2. Подключите приемник к сети интернет. Если вы уже подключили приемник к сети интернет, то можете пропустить этот шаг. 2.1. Подключитесь к web интерфейсу по адресу deshepigoXXXX.local или по ip адресу (для точки доступа DeshePiGO это 192.168.10.1). Подробнее о подключении к web интерфейсу в статье [“Быстрый старт!”](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-3zX). 2.2. Перейдите на вкладку wifi и подключите приемник к wifi сети, у которой есть интернет-соединение. При успешном подключении вы услышите звук успешного подключения к WIFI. Подключитесь к web интерфейсу в данной сети. Если не получается подключить обратитесь к статье [“Решение проблем”](https://wiki.pidt.net/books/priemniki-pigopidata/page/resenie-problem#bkmrk-%D0%9F%D1%80%D0%BE%D0%B1%D0%BB%D0%B5%D0%BC%D1%8B-%D1%81-%D0%BE%D0%B1%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%B8).ВАЖНО! На данный момент приемник не умеет подключаться к wifi точкам, у которых есть пробелы в названии, а также русские буквы. Идеальный вариант названия сети одно слово на латинице, или цифры (Примеры “Redmi”, “SamsungS23”, “IPhone”, “WifiPoint” и.т.д).
3. С главного экрана web интерфейса перейдите в Update. Если на сервере есть новая прошивка, то веб интерфейс предложит обновить ваш приемник до актуальной версии. 4. Обновите приемник. По окончании обновления приемник попросит перезагрузить его, в последней версии в той-же вкладке есть кнопка Reboot, в более ранних версиях выключите питание и подключите его заново. Время обновления зависит от качества вашего интернета, но время обновления не может превышать 20 минут. В случае возникновения проблем поищите решение в статье [“Решение проблем”](https://wiki.pidt.net/books/priemniki-pigopidata/page/resenie-problem#bkmrk-%D0%9F%D1%80%D0%BE%D0%B1%D0%BB%D0%B5%D0%BC%D1%8B-%D1%81-%D0%BE%D0%B1%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%B8-0). # Режим Static В данной статье будет рассматриваться работа приёмника DeshePiGO в режиме Static. Перед чтением рекомендуется ознакомиться со статьёй ["Быстрый старт".](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-3zX) В статье подробно описан [порядок включения приёмника](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-gTI#bkmrk-%D0%92%D0%B7%D0%B0%D0%B8%D0%BC%D0%BE%D0%B4%D0%B5%D0%B9%D1%81%D1%82%D0%B2%D0%B8%D0%B5-%D1%81-web) и [подключение к ](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-gTI#bkmrk-%D0%9F%D0%BE%D1%80%D1%8F%D0%B4%D0%BE%D0%BA-%D0%BF%D0%BE%D0%B4%D0%BA%D0%BB%D1%8E%D1%87%D0%B5%D0%BD%D0%B8%D1%8F-)[web интерфейсу](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-gTI#bkmrk-%D0%9F%D0%BE%D1%80%D1%8F%D0%B4%D0%BE%D0%BA-%D0%BF%D0%BE%D0%B4%D0%BA%D0%BB%D1%8E%D1%87%D0%B5%D0%BD%D0%B8%D1%8F-). Для управления устройством предусмотрена кнопка на нижней части антенны. При подаче питания следует обратить внимание на звуковой сигнал и подсветку кнопки. Перед началом работы необходимо выйти на открытое место для уверенного приёма ГНСС сигнала, после включения дождаться звукового сигнала о завершении процесса инициализации устройства, после чего приёмник готов к работе. ##### Вариант управления с помощью кнопки: 1. Начало записи. При долгом нажатии (более 3 секунд) на кнопку, DeshePiGO начнёт издавать[ звук запуска статики](https://wiki.pidt.net/books/priemniki-pigopidata/page/zvukovye-signaly#bkmrk-5.-%D0%97%D0%B2%D1%83%D0%BA-%D0%B7%D0%B0%D0%BF%D1%83%D1%81%D0%BA%D0%B0-%D1%81%D1%82%D0%B0%D1%82), что означает начало записи сессии Static. 2. Запись статики. В процессе записи статики, приёмник должен издавать ["звук во время записи статики/кинематики"](https://wiki.pidt.net/books/priemniki-pigopidata/page/zvukovye-signaly#bkmrk-%D0%97%D0%B2%D1%83%D0%BA-%D0%B2%D0%BE-%D0%B2%D1%80%D0%B5%D0%BC%D1%8F-%D0%B7%D0%B0%D0%BF%D0%B8%D1%81%D0%B8). 3. Конец записи. Для отключения режима статики сделайте долгое нажатие (более 3 секунд) на кнопку, отключение режима будет сопровождаться [звуком остановки статики](https://wiki.pidt.net/books/priemniki-pigopidata/page/zvukovye-signaly#bkmrk-%D0%97%D0%B2%D1%83%D0%BA-%D0%BE%D1%81%D1%82%D0%B0%D0%BD%D0%BE%D0%B2%D0%BA%D0%B8-%D1%81%D1%82%D0%B0%D1%82%D0%B8). Скачать файлы можно с помощью web интерфейса. ##### Вариант управления с помощью web интерфейса:В DeshePiGO доступна функция сохранения собственных координат. Подробную инструкцию по данному процессу можно найти в статье ["Добавление точек".](https://wiki.pidt.net/books/priemniki-pigopidata/page/dobavlenie-tocek)
После настройки нажмите кнопку "Static" для начала записи. [ 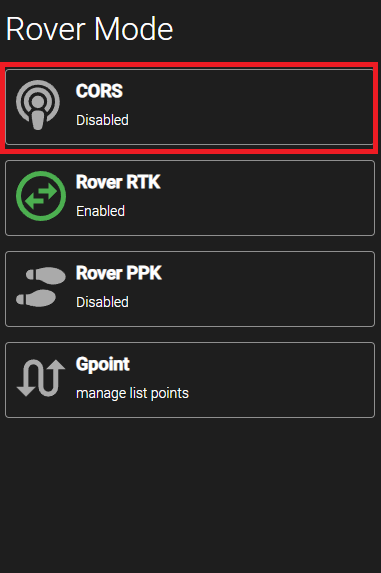 ](https://wiki.pidt.net/uploads/images/gallery/2024-05/snimok-ekrana-2024-05-18-141243.png)[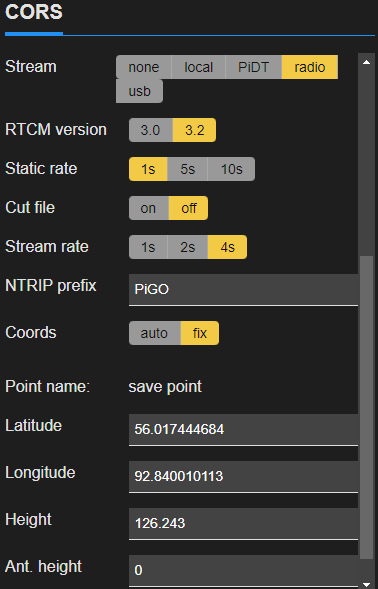](https://wiki.pidt.net/uploads/images/gallery/2024-09/snimok-ekrana-2024-09-21-143131.png)В случае, перебоя питания, заново подключитесь к точке доступа DeshePiGOXXXX. После этого приёмник автоматически продолжит запись статики.
При выборе формата RTСМ 3.2, у вас будет доступен только интервал вещания поправок (Stream rate) в 4 секунды, в то время как остальные интервалы станут недоступными.
- Static rate: интервал записи. - Stream rate: интервал вещания поправок. - Coords: Auto - включает режим автоматического определения координат. Fix - поля для ввода координат в wgs84 формате. После настройки нажмите кнопку "Static" для начала записи статики и вещания в модуль PiDali. [ 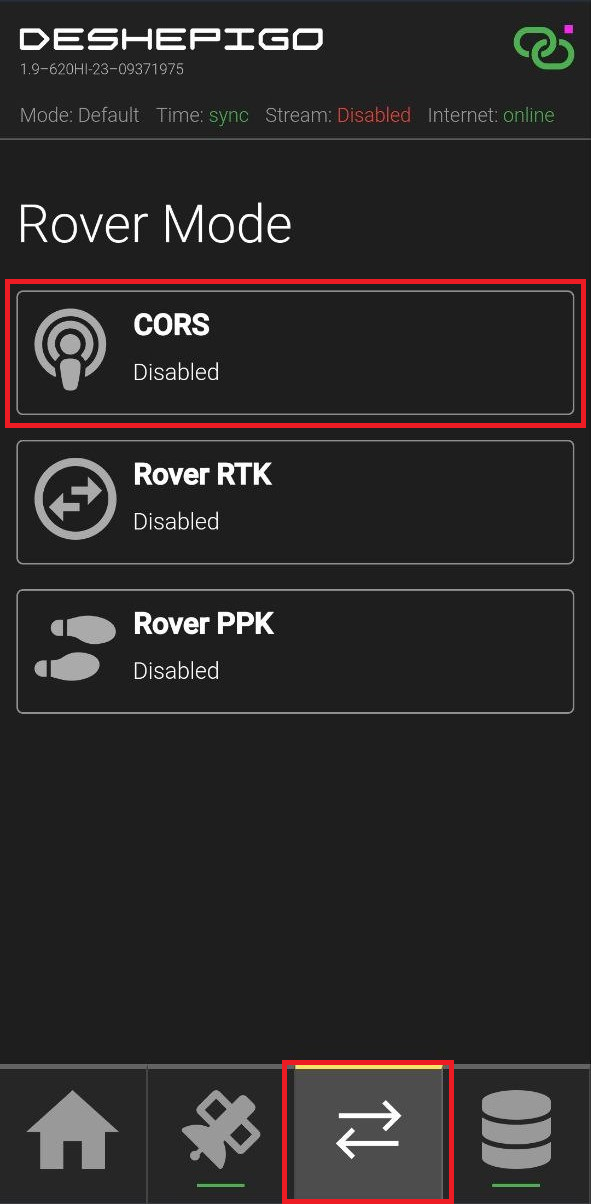 ](https://wiki.pidt.net/uploads/images/gallery/2024-02/pzostatika.png)[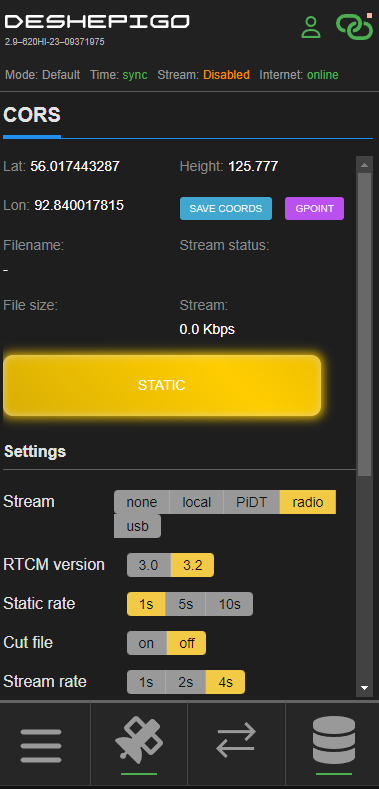](https://wiki.pidt.net/uploads/images/gallery/2024-09/snimok-ekrana-2024-09-21-141525.png)Как работать в режиме Static читайте в статье ["Режим Static"](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-static).
4. Выберите настройки PiDali. Перейдите в раздел Settings на Главном экране web интерфейса. Выберите следующие настройки: LoRa options: - Power - настраивает мощность передачи модуля PiDali. - Channel - настраивает частоту передачи модуля PiDali.У приёмника в режиме базовой станции и режиме ровера частота передачи (Channel) должна быть одинаковой.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-11/qJTnastroiki.png)[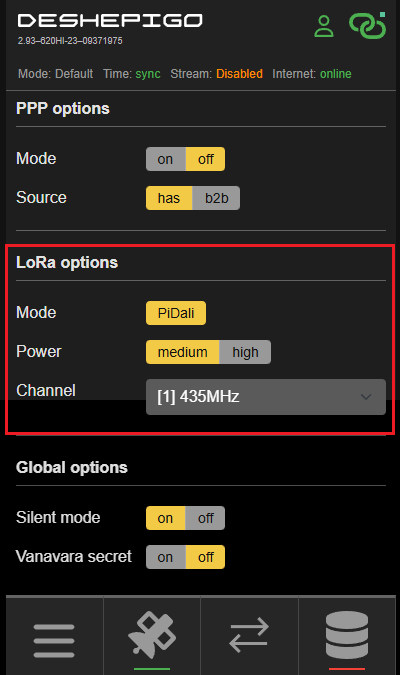](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-155008.png) ##### Приёмник в режиме ровера 1. Подключитесь к точке доступа. На устройстве, с которого вы хотите подключиться к веб интерфейсу обновите список доступных wifi сетей. Среди них должна быть сеть DeshePiGOXXXX. Пароль от точки доступа: 12345678 2. Перейдите на web интерфейс. Используйте последние 4 символа из имени точки доступа для перехода на web интерфейс. Пример: deshepigo1b78.local Если переход по имени не происходит, используйте адрес 192.168.10.1 (в режиме точки доступа DeshePiGO всегда находится на этом ip адресе). 4. Выберите настройки PiDali. Перейдите в раздел Settings на Главном экране web интерфейса. Выберите следующие настройки: LoRa options: - Power - настраивает мощность передачи модуля PiDali. - Channel - настраивает частоту передачи модуля PiDali. Выберите идентичную частоту, совпадающую с частотой приемника в режиме базы.У приёмника в режиме базовой станции и режиме ровера частота передачи (Channel) должна быть одинаковой.
[  ](https://wiki.pidt.net/uploads/images/gallery/2024-11/VEVnastroiki.png)[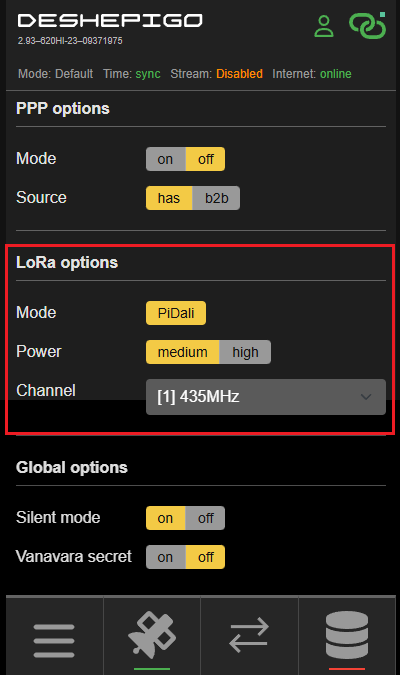](https://wiki.pidt.net/uploads/images/gallery/2024-11/6epsnimok-ekrana-2024-11-28-155008.png) 5. Настройте приёмник. Откройте раздел "Rover RTK" на нижней панели, нажав на третью кнопку. Нажмите кнопку "Rover" для получения поправок с приёмника в режиме базовой станции. Перед запуском, настройте следующие параметры: Укажите источник, откуда хотите получать поправки: - RADIO - по радиоканалу (Встроенный радио модуль - PiDali). [ 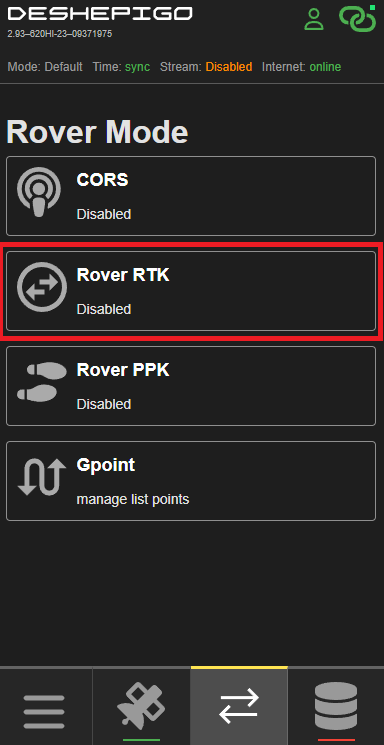 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-165035.png)[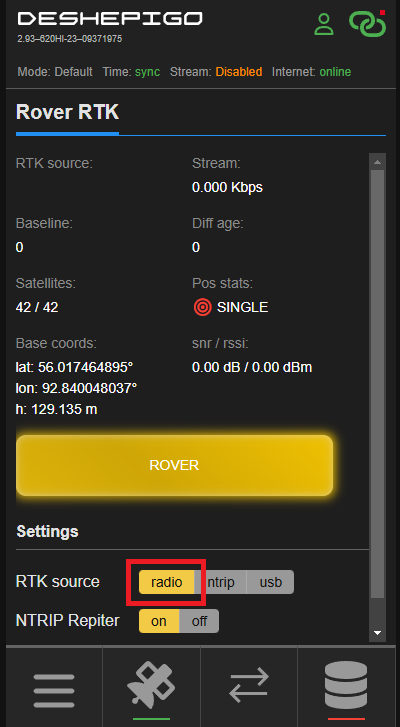](https://wiki.pidt.net/uploads/images/gallery/2024-11/radio.png) При активации кнопки "NTRIP Repiter", ровер DeshePiGO создаёт локальный кастер, позволяя РТК роверам подключаться к нему. Данные для подключения к локальному кастеру: - Хост: прописываем IP-адрес устройства DeshePiGo - Порт: 2101. - Логин и пароль: 1234 / 1234 - Точка подключения: DeshePiGO [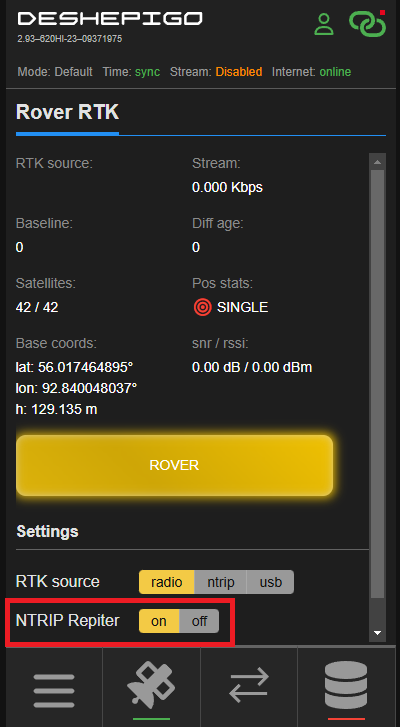](https://wiki.pidt.net/uploads/images/gallery/2024-11/repiter.png) После запуска, наблюдайте за индикатором скорости передачи данных (Stream). Когда на экране появится значение скорости, это будет указывать о начале передачи поправок с PiDali. На экране также будут отображаться такие статусы как: Baseline - текущее расстояние до базовой станции. Diff\_age - время жизни поправок. Satellites - количество отслеживаемых спутников. Pos stats - Статус фикса: - зелёный - FIX - черный - BASE - желтый - FLOAT - красный - SINGLE - зелёный - PPP - желтый - PPP\_CONVERGING SNR / RSSI - отношение сигнал шум (только в режиме PiDali), мощность принятого сигнала. 6. Настройте приёмник как RTK ровер. Перейдите в раздел Settings на Главном экране web интерфейса и включите настройку BLE, далее подключите приёмник к приложению к [7Star](https://t.me/pifiles/153). Как настроить приёмник в качестве ровера читайте в статье -Как настроить приёмник, в качестве ровера, читайте в статье - ["Работа DeshePiGO в качестве ровера"](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-rtk-rover).
# Работа DeshePiGO в качестве ровера В этой статье мы рассмотрим работу приемника DeshePiGO 2.9 в качестве ровера с использованием ПО 7Star. ##### Порядок работы 1. Включите приемник. Подключите антенну и питание. Дождитесь звуковых сигналов инициализации и подключения к Wi-Fi. 2. Подключитесь к точке доступа. На вашем устройстве выберите сеть DeshePiGOXXXX (пароль: 12345678). Чтобы перейти на web интерфейс введите deshepigoXXXX.local (где XXXX - последние 4 символа из имени точки доступа) или 192.168.10.1 в адресную строку браузера.Дополнительную информацию о DeshePiGO читайте в следующих статьях ["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)[Порядок включения приёмника](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika) и ["Порядок подключения к web интерфейсу"](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-podklyuceniya-k-web-interfeisu).
3. Перейдите на веб-интерфейс и активируйте функцию BLE в настройках, либо сделайте три коротких нажатия на кнопку приёмника для активации BLE. [ 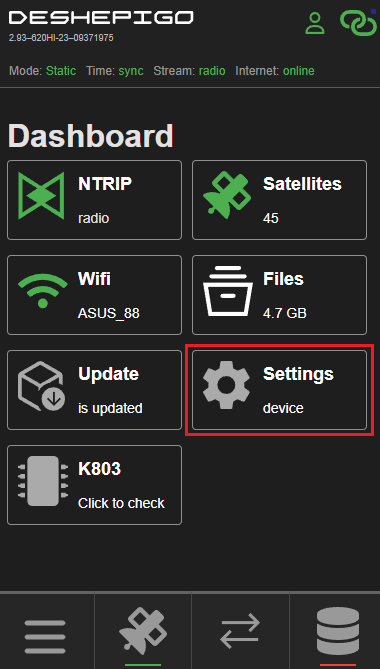 ](https://wiki.pidt.net/uploads/images/gallery/2024-11/fdfnastroiki.png)[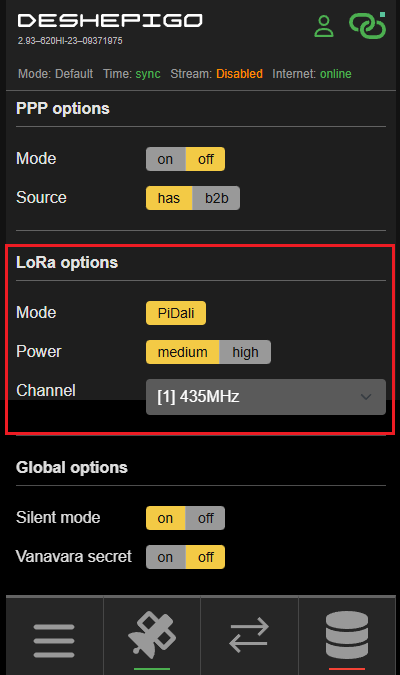](https://wiki.pidt.net/uploads/images/gallery/2024-11/LiRsnimok-ekrana-2024-11-28-155008.png) 4. Установите соединение между DeshePiGO и программой 7Star через Bluetooth (BLE). [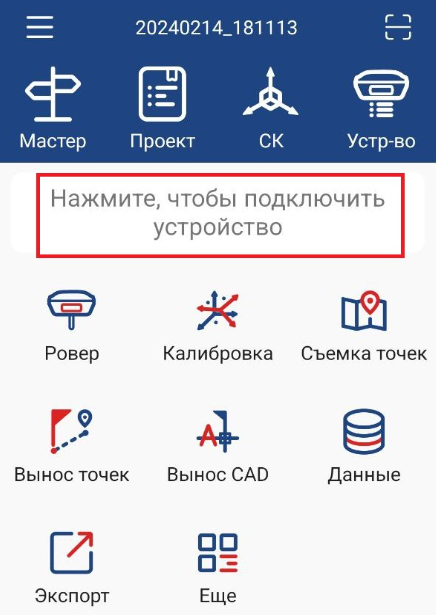](https://wiki.pidt.net/uploads/images/gallery/2024-09/0A1image.png) 5. Проверьте, что режим Ровера отключен — в противном случае появится иконка глобуса. Если режим Ровера активирован, перейдите в раздел «Ровер» и отключите его. В момент отключения, режим Ровера должен быть выключен на DeshePiGO. [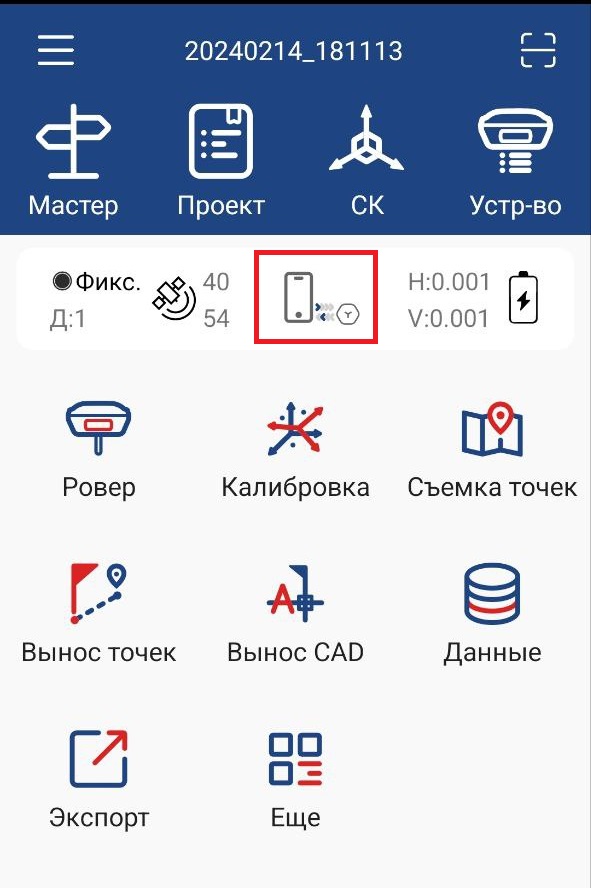](https://wiki.pidt.net/uploads/images/gallery/2024-09/photo-2024-09-21-13-38-39.jpg)В статьях о приемниках PiGO Lite "[Быстрый старт](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start#bkmrk-%D0%9D%D0%B0%D1%81%D1%82%D1%80%D0%BE%D0%B9%D0%BA%D0%B0-pigo-lite)" и ["Сеть РТК PiDATA"](https://wiki.pidt.net/books/set-rtk-pidata/page/podklyucenie-k-seti-pidata) вы сможете подробнее ознакомиться с тем, как работать с приложением 7Star и подключиться к сети РТК PiDATA.
6. Запустите режим ровера на DeshePiGO, нажав кнопку Rover. Предварительно укажите источник, откуда хотите получать поправки: - RADIO - по радиоканалу (Встроенный радио модуль - [PiDali](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-rtk-rover-s-ispolzovaniem-radiokanala-pidali)). - NTRIP - от базовой станции (Кастер pidt.net). - USB - через USB модуль (Pirat). [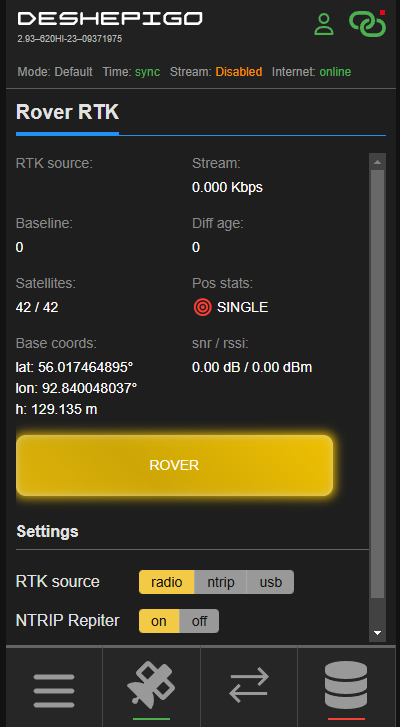](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-164530.png) Когда приемник DeshePiGO начнет работать в режиме ровера, вы сможете сохранить полученные координаты RTK и затем использовать их в режиме базы. Для этого достаточно перейти в раздел "CORS" и нажать кнопку "save coords". Узнать, как сохранить координаты, можно в статье[ «Добавление точек»](https://wiki.pidt.net/books/priemniki-pigopidata/page/dobavlenie-tocek). # Подключение DJI РТК дрона к DeshePiGO В современном геодезическом и картографическом мире дроны стали важным инструментом для задач, требующих точного позиционирования. Технология Real Time Kinematic (RTK) обеспечивает сантиметровую точность в реальном времени, что особенно полезно геодезистам и пилотам беспилотников, позволяя им получать критически важные данные для топографической съемки. Чтобы в полной мере использовать преимущества RTK, необходимо правильно настроить DJI РТК дрон. В данной статье предоставлена подробную инструкцию, которая позволит вам успешно выполнить эту задачу. Прежде чем приступить к работе, рекомендуется изучить статью о приёмнике DeshePiGO под названием ["Быстрый старт!"](https://wiki.pidt.net/books/priemniki-pigopidata/page/bystryi-start-3zX). #### Порядок работы ##### Настройте приёмник DeshePiGO 1. Включите приемник: Подключите антенну и питание. Дождитесь звуковых сигналов инициализации и подключения к Wi-Fi. 2. Подключитесь к точке доступа: На вашем устройстве выберите сеть DeshePiGOXXXX (пароль: 12345678). Чтобы перейти на web интерфейс введите deshepigoXXXX.local (где XXXX - последние 4 символа из имени точки доступа) или 192.168.10.1 в адресную строку браузера. 3. Подключитесь к Wi-Fi сети (при необходимости): Выберите вашу сеть на вкладке Wi-Fi web интерфейса. Введите пароль и подтвердите подключение. Дождитесь звукового сигнала успешного подключения.Порядок включения подробно описан в статье ["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)[Порядок включения приёмника](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika)["](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-vklyuceniya-priyomnika). Как подключиться к web интерфейсу и Wi-FI сети читайте в статье ["Порядок подключения к web интерфейсу"](https://wiki.pidt.net/books/priemniki-pigopidata/page/poryadok-podklyuceniya-k-web-interfeisu).
4. Настройте работу приёмника в качестве базовой станции. Перейдите в раздел "CORS" и настройте параметры для записи. Выберите в качестве вещания локальный кастер (Stream - local). После настройки параметров нажмите кнопку "Start" для начала записи. [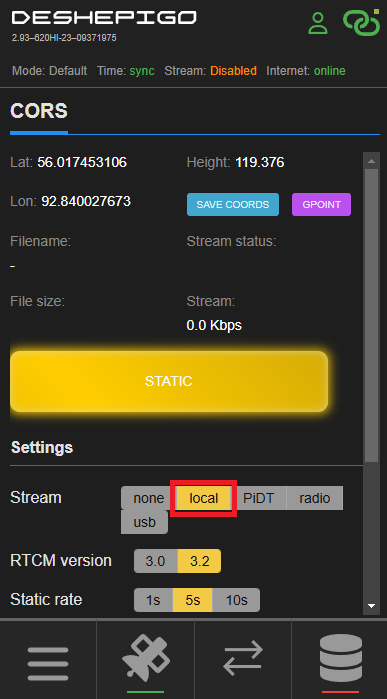](https://wiki.pidt.net/uploads/images/gallery/2024-11/snimok-ekrana-2024-11-28-145243.png)Во время записи, вы можете отслеживать куда отправляются поправки, размер и имя файла статики, скорость передачи поправок, а также текущие координаты, которое вещает устройство. Подробнее о режиме Статики читайте в статье по [ссылке](https://wiki.pidt.net/books/priemniki-pigopidata/page/rezim-static).
##### Настройте DJI РТК дронЧтобы определить, какой IP-адрес был назначен приёмнику, вы можете зайти в настройки вашего роутера и посмотреть эту информацию, либо воспользоваться приложением [PiSatel](https://wiki.pidt.net/books/pisatel-geodeziya-s-pigo/page/vozmoznosti-prilozeniya-pisatel#bkmrk-%D0%A1%D0%BA%D0%B0%D0%BD%D0%B5%D1%80-deshepigo) и использовать скан DeshePiGO.
Обратите внимание, что в названии точки доступа будут указаны уникальные 4 символа, которые в дальнейшем будут использоваться для подключения к веб интерфейсу! Запомните их или сохраните.
Если вы не можете войти на веб интерфейс по имени deshepigoхххх.local, воспользуйтесь программой [Network Scanne](https://play.google.com/store/apps/details?id=com.myprog.netscan)r для отслеживания ip адреса. Пример работы программы представлен на скриншоте ниже.
##### [](https://wiki.pidt.net/uploads/images/gallery/2024-02/4lF1.jpg) ##### Проблемы с обновлением устройства Не выходит обновить DeshePiGO до последней версии. • В новом обновлении сменился web интерфейс, и вы не видите результат обновления. Перезагрузите устройство и проверьте версию DeshePiGO • В ходе обновления произошла ошибка. Перезагрузите устройство и попробуйте заново. ##### Проблемы с обновлением GNSS модуля В среднем обновление K803 должно длиться около 2-5 минут. Обновление K803 не завершилось или завершилось с ошибкой. Возможные проявления: полоска обновления зависла в одном положении, в ходе обновления появилась надпись “ Update error!”. • Убедитесь, что ваш источник питания способен выдавать 1А. • Перезагрузите приемник и попробуйте снова. ##### Проблемы при скачивании файлов При скачивании файла, браузер запрашивает подтверждение для скачивания. Выполните следующие шаги для устранения этой проблемы: 1. Перейдите на веб - интерфейс DeshePiGO. 2. Перейдите в настройки сайта по кнопке "Не защищено". [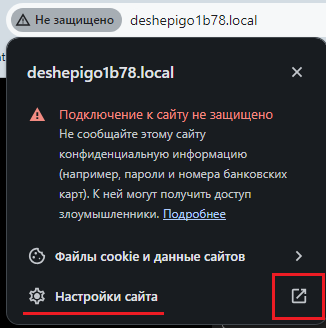](https://wiki.pidt.net/uploads/images/gallery/2024-05/snimok-ekrana-2024-05-21-150913.png) 3. Разрешите доступ к настройке "Небезопасный контент", как указано на скриншоте ниже. После этого файлы будут скачиваться без подтверждения на скачивание. [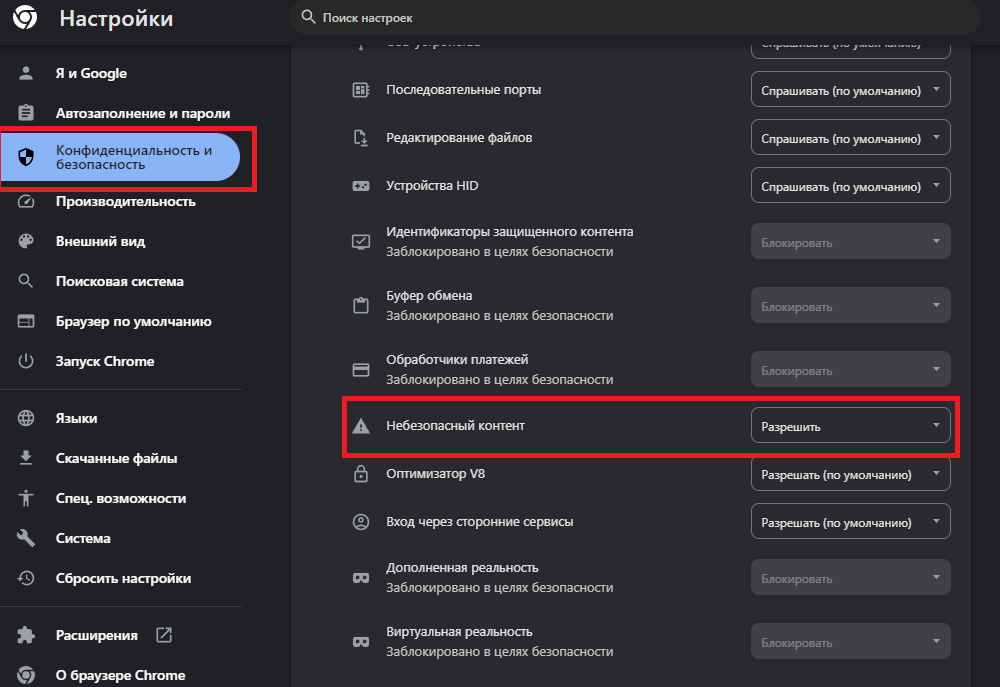](https://wiki.pidt.net/uploads/images/gallery/2024-05/snimok-ekrana-2024-05-21-150704.png)