# Проекты VD
##### **PiGO Lite**
**Описание**:
Современный мультичастотный всесистемный ГНСС приемник, предназначенный для высокоточных измерений позиционирования при проведении геодезических работ. В режиме РТК приемник способен работать от базовых станций с поддержкой последних версий открытого протокола передачи поправок RTCM. Также способен брать в обработку новейшие сигналы и спутниковые группировки.
**Использование:**
Работа приемника PiGO Lite возможна только с ПО 7Star от компании SinoGNSS(Comnav) и ПО от компании Vanavara Digital.
1. Работа приёмника в RTK режиме с использованием референсной базовой станции PiDATA.
2. Работа приёмника в RTK режиме для использования в фотограмметрии.
3. РТК приёмник PiGO Lite, как базовая станция с использованием ПО PiSun.
4. Работа в режиме Статики и PPK.
**Стадия разработки:** Разработан
**Статья:** [PiGO Lite - ультракомпактный ГНСС](https://wiki.pidt.net/books/pigopidata/chapter/pigo-lite-ultrakompaktnyi-gnss)[ ](https://wiki.pidt.net/uploads/images/gallery/2023-11/vmb07fffebd-a5ae-46ef-93ce-7d03c39d026a.jpeg)
[  ](https://wiki.pidt.net/uploads/images/gallery/2023-11/vmb07fffebd-a5ae-46ef-93ce-7d03c39d026a.jpeg) [ ](https://wiki.pidt.net/uploads/images/gallery/2023-11/b411a6a4-ce9f-4117-a689-fd0d30817643.jpeg)
##### **PiGO Lite** **Plus**
**Описание:**
PiGO Lite Plus это современный мультичастотный всесистемный ГНСС приемник от компании Vanavara Digital.
Основан на современном модуле Comnav(SinoGNSS) K902.
**Использование:**
1. Работа в РТК как PiGO Lite
2. Запись статики 1 Гц (8 ГБ памяти)
3. Запись кинематики 5 Гц (8 ГБ памяти)
4. Инклинометр для индикации уровня вешки
5. Подключение PiRat или PiDali по type-c
**Стадия разработки:** В разработке
**Статья:** [PiGO Lite Plus](https://wiki.pidt.net/books/pigopidata/page/pigo-lite-plus)
[](https://wiki.pidt.net/uploads/images/gallery/2025-04/N2jimage.png)
##### **PiDATA 2.0**
**Описание:**
Референсная базовая станция PiDATA - стационарное устройство для непрерывного обеспечения ГНСС-приемников измерительной и корректирующей информации для постобработки и высокоточного позиционирования в реальном времени.
**Использование****:**
1. Автоматическое определение координат и передача RTCM3 поправки в NTRIP кастер.
2. Запись файлов статики и отправка их в Telegram канал.
**Стадия разработки:** Разработан
**Статья:** [PiDATA 2.0](https://wiki.pidt.net/books/pigopidata/chapter/pidata-20-referensnaya-bazovaya-stanciya)
[](https://wiki.pidt.net/uploads/images/gallery/2023-11/pxl-20230413-113338328.jpg)
##### **PiDATA Lite**
**Описание:**
PiDATA Lite - уникальная референcная геодезическая базовая станция, которая работает в составе сети [PiDATA](https://pidt.net/). Основана на лучшем ГНСС модуле в мире от компании Comnav (SinoGNSS). PiDATA Lite принимает и транслирует обсервации всех спутниковых группировок на частотах L1/L2/L5/B1/B2/B3/G!/G2/G3 и тд.
**Стадия разработки:** В разработке
**Статья:** [PiDATA Lite](https://wiki.pidt.net/books/pigopidata/page/cto-takoe-pidata-lite)
[](https://wiki.pidt.net/uploads/images/gallery/2025-03/snimok-ekrana-2024-12-18-163127.png)
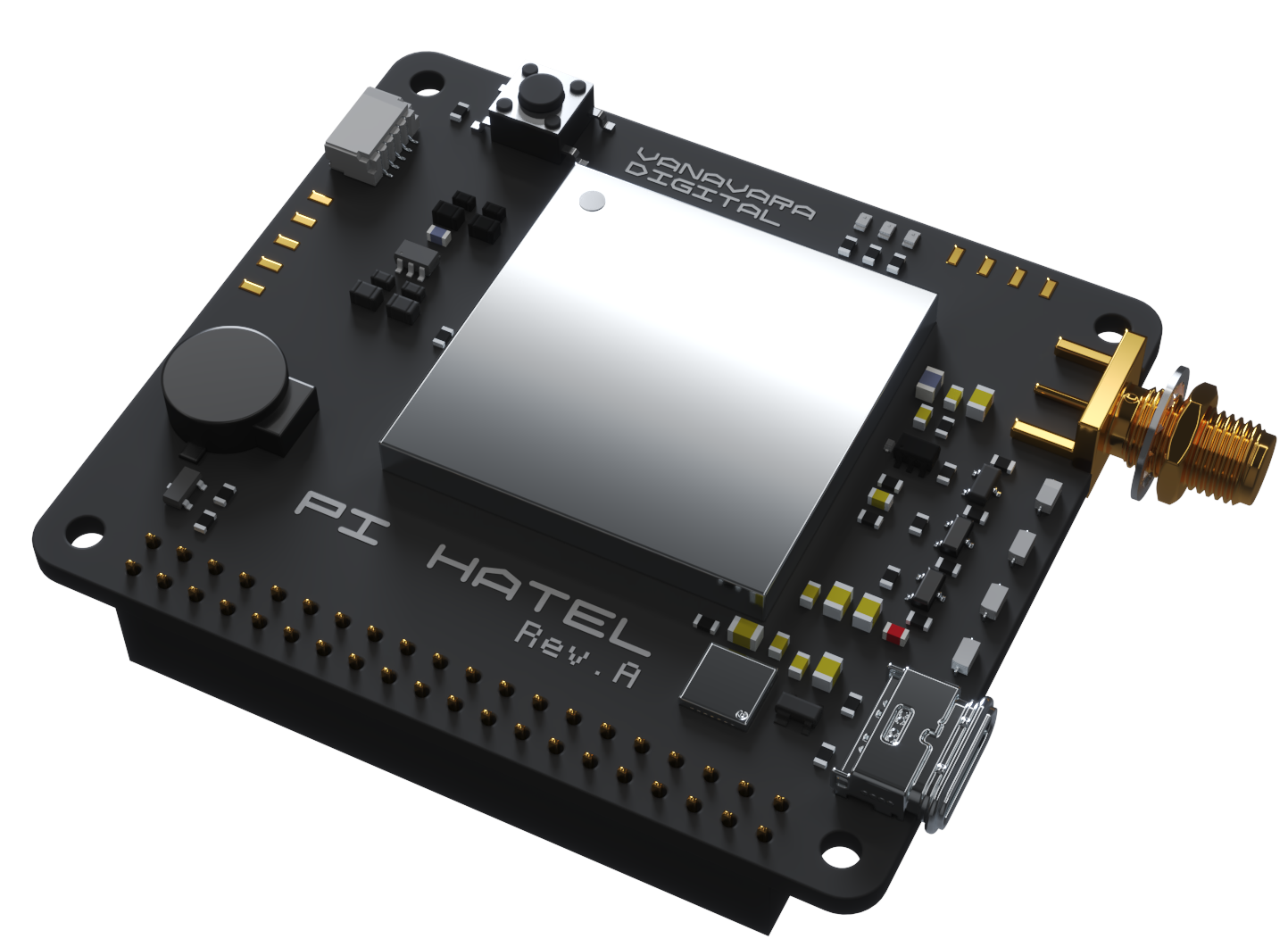
##### **PiHatel**
**Описание: **
Модуль расширения PiHatel представляет собой решение для одноплатных компьютеров Raspberry Pi 3 и 4, а также макетной платой для собственных изысканий в сфере геодезического оборудования. Плата основана на GNSS модуле от компании ComNav - K803, который может выполнять различные задачи, в том числе и в сфере геодезии. PiHatel открывает новые горизонты для специалистов в области геодезии и навигации, позволяя им создавать собственные уникальные решения, адаптированные под свои конкретные потребности.
**Использование:**
1. Работа платы в качестве геодезического ровера в RTK режиме с использованием референсной базовой станции PiDATA.
2. Работа PiHatel, как базовая станция с использованием ПО PiSun.
**Стадия разработки:** Разработан
**Статья: **[PiHatel](https://wiki.pidt.net/books/gnss-plata-pihatel)
[](https://wiki.pidt.net/uploads/images/gallery/2024-04/pixatel.png)
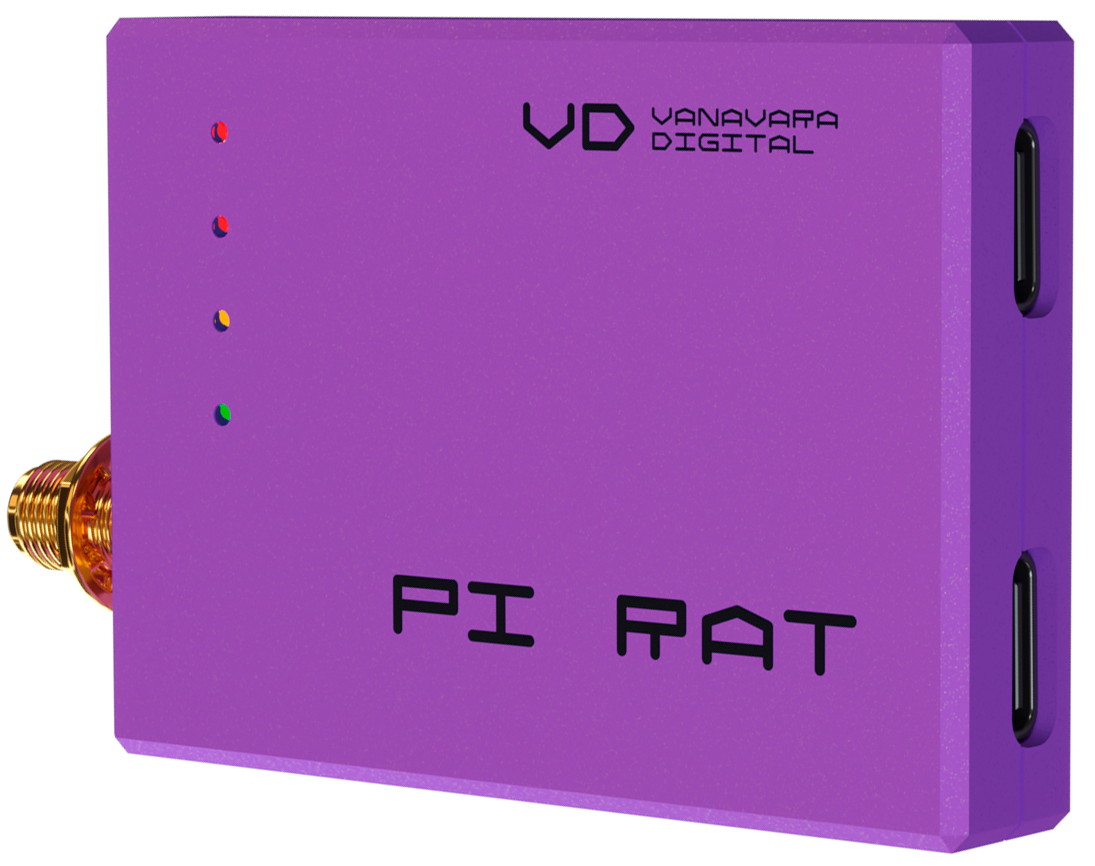
##### **УКВ PiRat**
**Канал с новостями Vanavara Digital в Телеграм: [https://t.me/pifiles](https://t.me/pifiles)**
**Магазин оборудования в Телеграм: [https://t.me/pishopbot](https://t.me/pishopbot)**
**Описание:**
Приёмник УКВ PiRat предназначен для беспроводного приёма данных по радиоканалу. Он базируется на модуле HX-DU1022D, который поддерживает разнообразные протоколы связи, включая TRIMTALK, TRIMMK3, TT450S, TRANSEOT, SOUTH, SATEL.
**Использование:**
Использовать УКВ PiRat можно с помощью мобильного приложения [PiSatel](https://wiki.pidt.net/books/pisatel-geodeziia-s-pigo) от компании Vanavara Digital. PiSatel создаёт TCP сервер к которому можно подключиться сторонним ПО (например [7Star](https://wiki.pidt.net/books/poleznye-materialy-pofaily/chapter/7star-geodeziceskoe-prilozenie)). УКВ приёмник принимает данные с базовой станции и передаёт их с помощью PiSatel в устройство, подключённое к стороннему приложению.
**Стадия разработки:** Разработан
**Статья:** [УКВ связь PiRat](https://wiki.pidt.net/books/ukv-svyaz-pirat)
[](https://wiki.pidt.net/uploads/images/gallery/2024-04/pirat.png)
##### **УКВ приставка PiDali**
**Описание:**
УКВ приставка PiDali представляет собой устройство, предназначенное для беспроводного приёма и передачи данных по радиоканалу. Она ориентирована на работу с потоком RTCM-данных и поддерживает протокол PiDali, что делает её универсальным инструментом для взаимодействия с любыми УКВ базами.
**Использование:**
PiDali разработана для работы в условиях, где требуется надёжная и точная передача данных между устройствами. Она особенно актуальна для геодезических и навигационных задач, где используется технология RTK (Real-Time Kinematic). Благодаря поддержке протокола PiDali, устройство может эффективно взаимодействовать с различными УКВ базами, обеспечивая стабильный поток корректирующих данных.
**Стадия разработки:** В разработке
**Статья:** [УКВ приставка PiDali](https://wiki.pidt.net/books/ukv-pristavka-pidali/page/ukv-pristavka-pidali)
[](https://wiki.pidt.net/uploads/images/gallery/2025-04/ZNxphoto-2025-04-25-19-33-41.jpg)
##### **DeshePiGO**
**Описание:**
DeshePiGO это современный мультичастотный всесистемный ГНСС приемник от компании Vanavara Digital. Приемник DeshePiGO оснащён 4-х ядерным миникомпьютером с операционной системой Linux, что дает почти безграничные возможности для выполнения ваших задач. Встроенный модуль Лора обеспечивает передачу данных по радиоканалу. Мощность передатчика составляет 1 Вт, что в совокупности с технологией модуляции LoRa позволяет работать на расстояниях от 2-ух до 5-ти километров.
**Использование:**
1. Работа приёмника в качестве RTK ровера;
2. Работа приёмника в качестве PPK ровера;
3. RTK вещание в pidt.net;
4. RTK локальный кастер;
5. Работа приёмника в качестве базовой станции.
**Стадия разработки: **Разработан
**Статья: **[DeshePiGO - мультичастотный ГНСС приёмник](https://wiki.pidt.net/books/pigopidata/chapter/deshepigo-multicastotnyi-gnss-priyomnik)
[](https://wiki.pidt.net/uploads/images/gallery/2023-12/JVX2.jpg)
##### **PiSlam**
**Описание:**
PiLi - лазерный локационный дальномер, использует технологию дистанционного зондирования для измерения расстояний до объектов на основе времени задержки обратно отраженного лазерного луча.
**Использование:**
Лидар позволяет точно измерять расстояния до объектов и создавать трехмерные изображения окружающей среды.
**Стадия разработки:** В разработке
**Статья:** [PiSlam. Быстрый старт!](https://wiki.pidt.net/books/pislam-novaia-geodeziia/page/bystryi-start)[ ](https://wiki.pidt.net/uploads/images/gallery/2025-10/photo-2025-10-15-12-22-05.jpg)
[  ](https://wiki.pidt.net/uploads/images/gallery/2025-10/photo-2025-10-15-12-22-05.jpg) [ 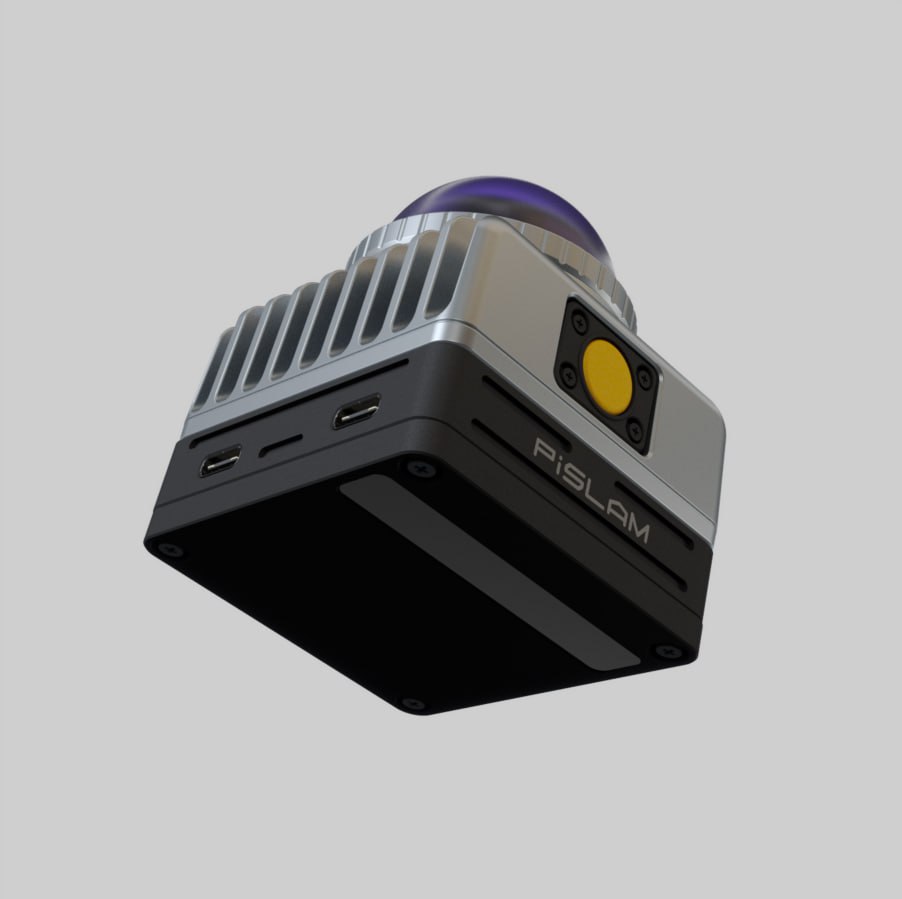](https://wiki.pidt.net/uploads/images/gallery/2025-10/photo-2025-10-03-10-27-42.jpg)
##### **
PiHalo**
**Описание:**
Эхолот - узкоспециализированный гидролокатор, устройство для исследования рельефа дна водного бассейна. Эхолот посылает сигнал (звуковую волну) и определяет дистанцию до объекта путем измерения времени между моментом отправки сигнала и моментом, когда звуковая волна возвращается, отражаясь от объекта. Этот отраженный сигнал затем анализируется прибором для определения глубины.
**Использование:**
С использованием эхолота возможно получить детальное изображение дна водоема, обнаружить подводные преграды и объекты, а также выявить изменения рельефа. Информация о глубине записывается одновременно с данными в режиме кинематики. Последующая обработка этих данных позволяет создавать подробные карты дна, отслеживать изменения глубины со временем и разрабатывать навигационные маршруты, учитывая особенности дна водоема.
**Стадия разработки:** В разработке
**Статья**: [PiHalo. Быстрый старт!](https://wiki.pidt.net/books/pihalo/page/bystryi-start)
[](https://wiki.pidt.net/uploads/images/gallery/2024-04/exalot.jpg)