
Инструкция по эксплуатации beta версии сканера PiSlam
Данная инструкция предназначена для обеспечения корректного и высококачественного сканирования при использовании сканера PiSlam. Следуя рекомендациям, вы сможете минимизировать ошибки позиционирования и повысить точность получаемых данных.
Рекомендации по процессу сканирования
1. Стабильное начало записи
После нажатия кнопки «Начать запись» удерживайте сканер в неподвижном состоянии не менее 10 секунд. Это необходимо для улучшения позиционирования сканера в пространстве.
2. Плавные движения
Избегайте резких движений, тряски, бега или прыжков во время сканирования. Сканер чувствителен к динамическим нагрузкам — плавное и равномерное перемещение способствует более стабильному построению облака точек.
3. Постоянное наличие объектов в поле зрения
Не допускайте длительного отсутствия объектов в зоне сканирования. Пустые пространства (например, при направлении сканера в небо) могут привести к потере ориентации алгоритма. Рекомендуется направлять сканер на землю или близлежащие поверхности при переходе между объектами.
4. Сканирование в условиях движения крупных объектов
Избегайте сканирования при проезде крупногабаритного транспорта (автобусы, грузовики и т.п.). Одновременное движение сканера и крупного объекта может исказить результат. Остановитесь и дождитесь, пока объект покинет зону сканирования.
5. Закольцовывание траектории
Возвращение в начальную точку (закольцовывание) не требуется — система не зависит от замкнутой траектории.
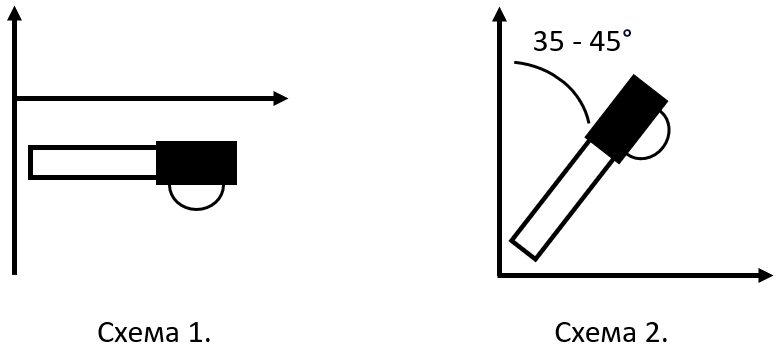
Выбор положения лидара
Схема 1 — положение сканера при съёмке рельефа. Высота объектов до 5 метров.
Схема 2 — положение сканера при съёмке вертикальных объектов. Высота объектов до 15 метров.
Использование опознавательных знаков (опознаков)
Для повышения точности и надёжности результатов рекомендуется заранее спланировать маршрут и разместить контрольные и опорные знаки.
Опорные знаки служат основой для геометрической привязки и коррекции траектории сканирования.
Требования:
1. Количество опорных знаков— не менее 6.
2. Максимальное расстояние между соседними опознаками — 40 метров (по траектории движения).
3. Не размещайте опознаки слишком близко друг к другу — это может привести к эффекту "задвоения" точек.
Важно: система PiSlam сильно зависит от опорных знаков. Их неправильное размещение может существенно повлиять на качество скана.
Контрольные знаки используются для последующей проверки точности полученных данных.
Рекомендации:
1. В качестве контрольных знаков предпочтительно использовать дорожные знаки — они хорошо выделяются по интенсивности в готовом облаке точек.
2. Для эффективного контроля точности, размещайте контрольные знаки между опорными, особенно в зонах с высокой сложностью рельефа или застройки.
Схемы размещения опознаков и траектории движения
- Опорные знаки(О)
Схема 1. Петля без опорного знака
Небольшая петля в траектории (вне зоны видимости в 35 метров от других опознаков), не зафиксированная опорным знаком, может привести к значительной ошибке в этой петле.
Решение: размещайте опорные знаки в каждой петле или возвратной части маршрута, а также в крайних точках сканируемой области.
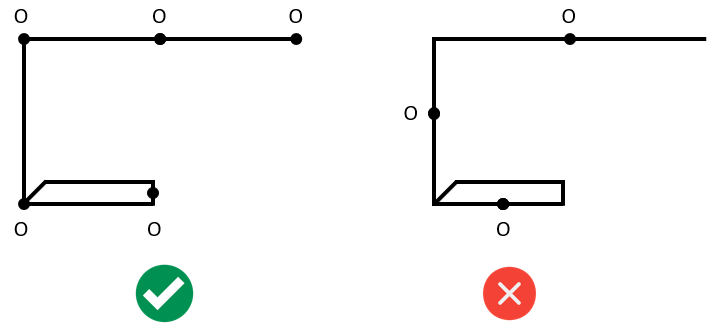
Схема 2. Линейное размещение опознаков
Не располагайте опорные знаки в одну линию. Это приведет к скручиванию результирующего скана.
Решение: при сканировании линейных объектов (дороги, трассы) делайте отходы в сторону (рекомендуемая длина — 20 метров) с установкой опорных знаков.
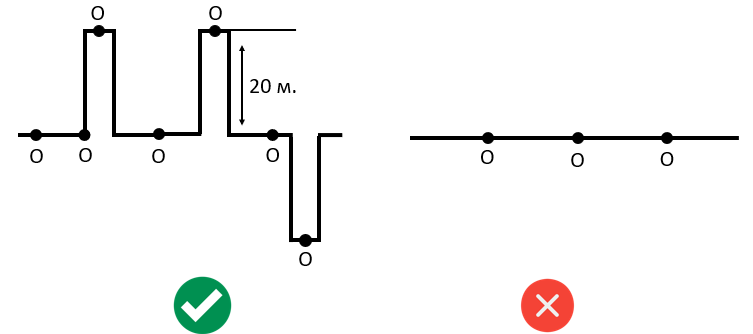
Схема 3. Галсы (проходы туда-обратно)
Расстояние между параллельными галсами не должно превышать 35 метров. При большем удалении возможно образование зон с низкой плотностью точек и потерей детализации.
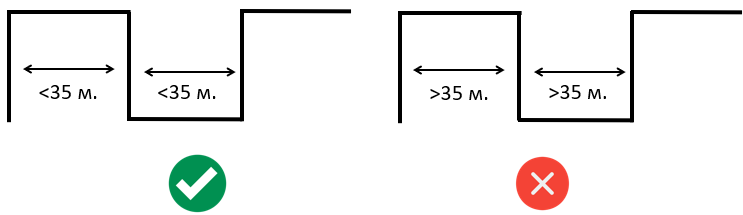
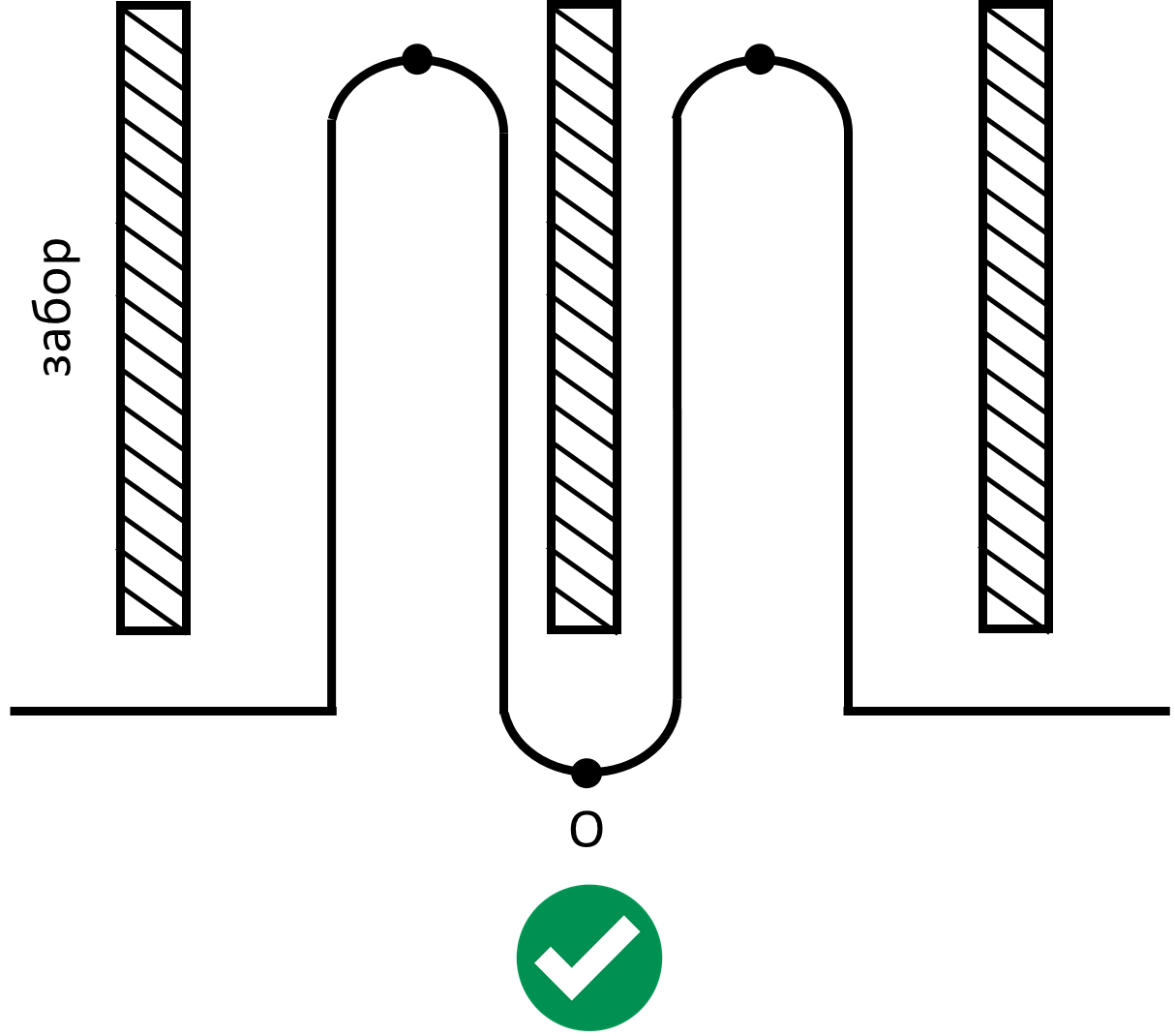
Схема 4. Петля вне зоны видимости
Если между двумя участками траектории, образующими петли, отсутствует прямая видимость (например, из-за ограждения), система не сможет корректно установить пространственную связь между ними.
Решение: в каждом из замкнутых участков (петель), разделённых препятствием, обязательно устанавливайте опорные знаки.
Соблюдение данных рекомендаций позволит получить качественное, точное и надёжное облако точек даже на этапе использования бета-версии сканера PiSlam. Обратите особое внимание на подготовку маршрута и размещение опознаков — это ключевые факторы успеха сканирования.