
PiSun CORS
Программа PiSun CORS с открытым исходным кодом позволяет записывать статику и преобразовывать PiGo Lite в референcную базовую станцию. Программа писалась и тестировалась на операционной системе Windows 10 с установленным пакетом для разработки Python 3.
Исходные файлы программы можно скачать по ссылке PiSun CORS. Скачать программу можно по ссылке PiSun CORS.
Для обеспечения стабильной работы программы, рекомендуется добавить все компоненты в исключения Браундмауэра. Это позволит приложению корректно функционировать и обмениваться данными сети без препятствий, обеспечивая полноценное взаимодействие с другими устройствами.
Функционал программы
- Подключение к PiGO Lite и его настройка.
- Получение дифференциальных поправок с PiGO Lite и отправка их на бесплатный кастер сети pidt.net или на локальный кастер.
-
Запись статики в формате CNB.
- Разделение файлов статики по часам для удобства архивации и анализа.
- Вывод различных статусов работы для контроля активности программы.
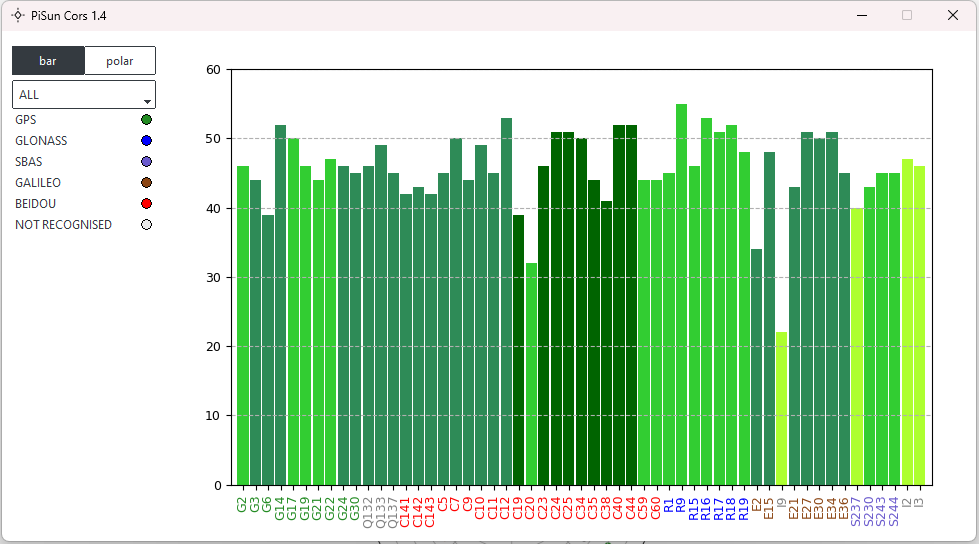
- Отображение состояний спутников на столбцовой диаграмме.
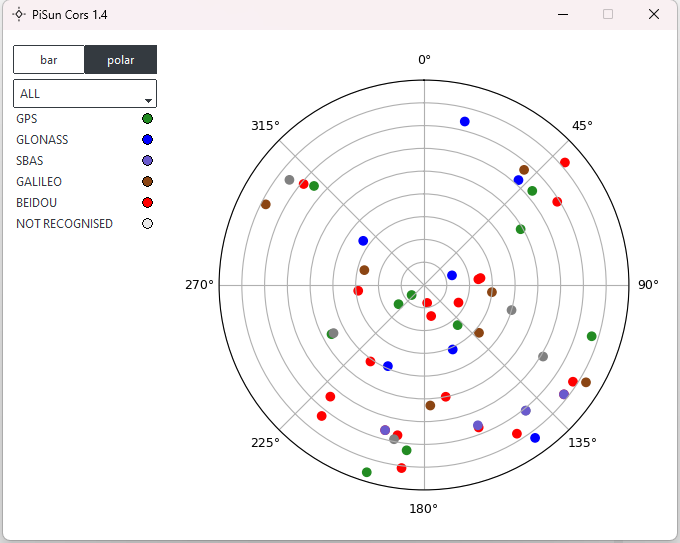
- Визуализация положения спутников на небосводе с помощью диаграммы в полярных координатах.
-
Настройка K803 для получения сигнала синхронизации времени и меток.
-
Выбор формата для передачи дифференциальных поправок.
Порядок работы
1. Выбор com порта.
Перед началом работы необходимо выбрать тот com порт, который подключен к PiGO Lite (название устройства можно посмотреть в диспетчере устройств Windows, обычно в в нём присутствует следующее: cp210x).
Для корректной работы с com портом убедитесь, что у вас установлен подходящий драйвер. Если вы не можете найти нужный com порт, установите следующий драйвер:
CP210x_Windows_Drivers.zip - с нашего сервера
https://www.silabs.com/documents/public/software/CP210x_Windows_Drivers.zip - с сайта разработчика
2. Соединение с портом.
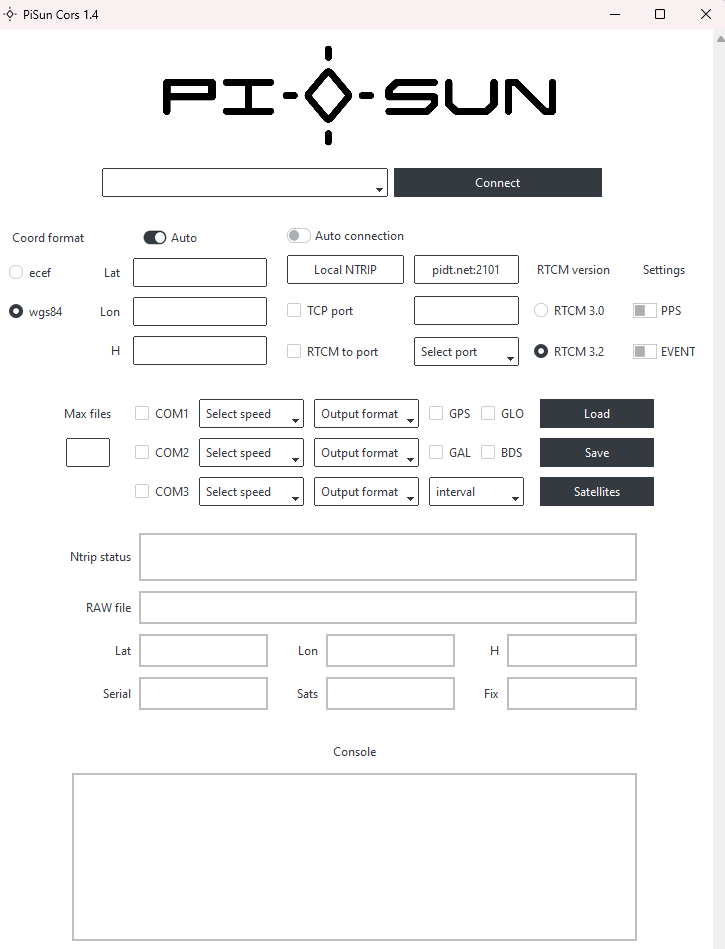
Connect - кнопка, при нажатии которой программа соединяется с выбранным com портом и пытается настроить устройство на выбранный вами режим работы.
Auto connection - функция автоподключения. Для использования этой функции необходимо установить ползунок Auto connection в активное положение, выбрать устройство к которому будет происходить подключение, а также установить остальные настройки по вашим требованиям. После этого необходимо нажать кнопку Save. Для проверки закройте программу и откройте заново. PiSun должен автоматически вернуться в активное состояние.
3. Разрыв соединения с портом.
Disconnect - кнопка, при нажатии которой программа разрывает соединение с выбранным com портом и прекращает взаимодействие с устройством.
4. Настройка координат.
Auto - включает режим автоматического определения координат. Он может быть использован, если точность фиксированных координат не является решающим фактором.
Lat, Lon, Height - поля для ввода координат в wgs84 формате.
Координаты прописываются в формате ecef или wgs84. Настройка координат должна производиться до нажатия кнопки Connect.
5. Выбор вещания.
Local NTRIP - создаёт локальный кастер. Для соединения с кастером необходимо подключиться к точки доступа PH и ввести пароль/логин (1234). Если рядом с TCP установить галочку, то при выборе Local NTRIP также создается TCP сервер с указанным портом. Поле ввода TCP порта находится справа от кнопки TCP.
pidt.net:2101 - подключается к кастеру сети pidt.net:2101.
Local NTRIP|pidt.net:2101 - одновременное вещание на бесплатный кастер сети pidt.net и на локальный кастер.
RTCM to port - функция для отправки RTCM пакетов в com порт. Список с com портами находится справа от кнопки.
6. Выбор формата для RTCM.
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
7. Настройка PPS и Event.
PPS - настройка используется для синхронизации времени между геодезическим приемником и внешним устройством, например, лидаром. В данном случае это позволяет получить точное местоположение съёмки.
Event - эта настройка активирует режим получения событий в модуле K803. При подаче сигнала на пин event в файл cnb попадает метка с временем, в которое этот сигнал пришел.
8. Настройка ротации файлов.
Max files - в поле указывается максимальное количество файлов, которое будет храниться на устройстве. По достижению этого количества, ранее записанные файлы будут автоматически удаляться.
9. Настройка портов К803.
COM1, СОМ2, СОМ3 - настройка внешних UART портов К803. Включите настройку, установив переключатель напротив COM1, COM2 или COM3. Выберите параметры настройки:
Select speed (скорость порта): выберите из списка.
Output format (формат для RTCM): выберите из списка.
GPS, GAL, GLO, BDS : выберите спутниковую группировку (необходимо выбрать хотя бы одну группировку).
RTCM interval: выберите дискретность вещания поправок.
Настройки можно устанавливать выборочно для каждого порта, либо установить одновременно для всех портов.
Обратите внимание! Выбор COM порта зависит от используемого приемника. Если вы используете PiGo Lite, то вы можете настроить только порт COM3 (который подключен к Bluetooth модулю), так как PiSun подключается через порт COM1 (который подключен к USB Type C). Если вы используете PiHatel и подключили его к Raspberry через разъем 40 pin, то вы можете настроить порты COM2 и COM3. Смотрите распиновку PiHatel в статье "Подключение к PiHatel".
10. Статусы.
Ntrip status - показывает статус работы кастера.
RAW file - показывает статус записи файла.
Lat, Lon, Height - показывает текущие координаты, которое вещает устройство.
11. Вывод данных.
Serial - поле, предназначенное для отображения серийного номера устройства.
Sats - отображает количество спутников, которые видит приемник.
Fix - указывает на текущий статус фиксированного решения.
Console - поле предназначено для вывода уведомлений о текущем состоянии работы программы, а также для отображения некоторых возможных ошибок.
12. Сохранение и установка настроек.
load - загружает последние сохранённые настройки.
save - сохраняет текущие настройки (они записываются в файл settings.json в каталоге resources).
13. Диаграммы.
Satellites - при нажатии на кнопку, программа создает новое окно, в котором будут отображаться диаграммы. На этих диаграммах представлены спутники и их отношения сигнал/шум. Чем темнее столбец, тем больше частот принимается от спутника. Для удобства, можно также использовать фильтр для отображения определенных спутниковых группировок.
bar - при нажатии на кнопку, откроется столбцовая диаграмма.
polar - при нажатии на кнопку, можно отобразить данные в виде полярной диаграммы.
Cтолбцовая диаграмма
Полярной диаграммы
Cкачать файлы
После соединения программа начинает получать данные с приемника и записывать их в файл, расположенный в каталоге files. Название файла формируется из следующих данных: "годмесяцденьминутасекунда.cnb". В начале каждого часа текущий файл закрывается и начинается запись нового. Вещание дифференциальных поправок происходит одновременно с записью файла.
Вы можете получить дополнительную информацию, задать вопросы, а также быть в курсе последних новостей и разработок в официальном Telegram чате PiSUN открытый код для PiGO.