
PiSun Raspberry PI
Открытое программное обеспечение PiSun Raspberry PI позволяет записывать спутниковые измерения в режиме статики, а также поддерживает использование PiGO Lite или шилда PiHatel на одноплатных компьютерах Raspberry Pi 3 или 4, с установленной операционной системой linux.
Программа писалась и тестировалась на операционной системе linux с установленным пакетом для разработки Python 3. Для создания локального кастера в ПО используется библиотека rtklib с использованием утилиты str2str. Программа управляется при помощи веб интерфейса который доступен на 80-ом порту устройства. Исходные файлы программы можно скачать по ссылке PiSun CORS.
В основном PiSunRPI предназначен для работы в совокупности с PiHatel, который имеет аналогичный функционал, что и приемник PiGo Lite. В статье рассмотрим основной функционал этого open source продукта.
PiSunRPI может работать не только с одноплатными компьютерами, но и с полноценными ПК.
Функционал программы:
- Подключение к PiHatel и его настройка.
- Получение данных с PiHatel и их отправка на бесплатный кастер сети pidt.net, либо создание собственного локального кастера.
- Запись статических данных в удобном формате RTCM3.
-
Запись статики в формате CNB.
- Разделение файлов статики по часам для удобства архивации и анализа.
- Вывод различных статусов работы для контроля активности программы.
- Визуализация положения спутников на небосводе с помощью диаграммы в полярных координатах.
-
Настройка K803 для получения сигнала синхронизации времени и меток.
-
Выбор формата для передачи дифференциальных поправок.
- Управление точками.
- Облачная конвертация CNB файлов в формат RINEX.
-
Интеграция системы координат в поток поправок.
Порядок работы:
Установить программу можно вручную, либо с помощью образа. Подробнее об этом вы можете прочитать в статье "Установка PiSunRPI ".
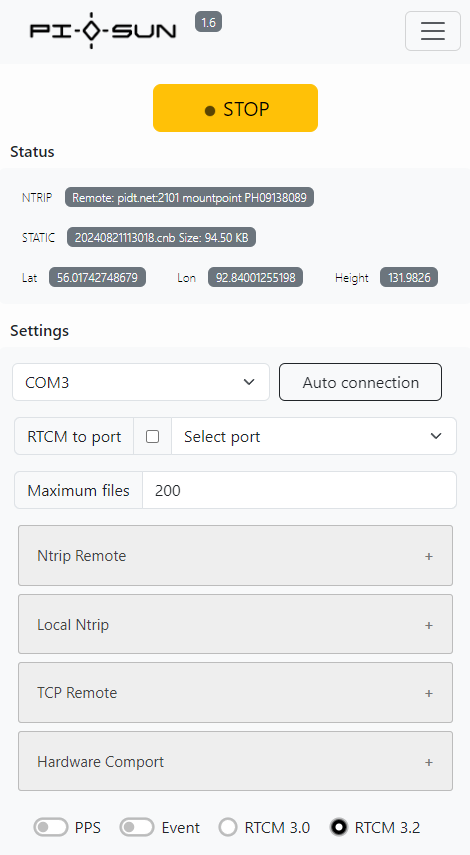
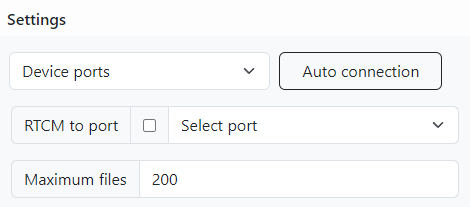
1. Начальные настройки.
Перед началом работы необходимо выбрать тот com порт, который подключен к PiHatel (В названии порта обычно должно быть упоминание AMA0. Если вы подключаете PiGO Lite, то название порта будет USB0).
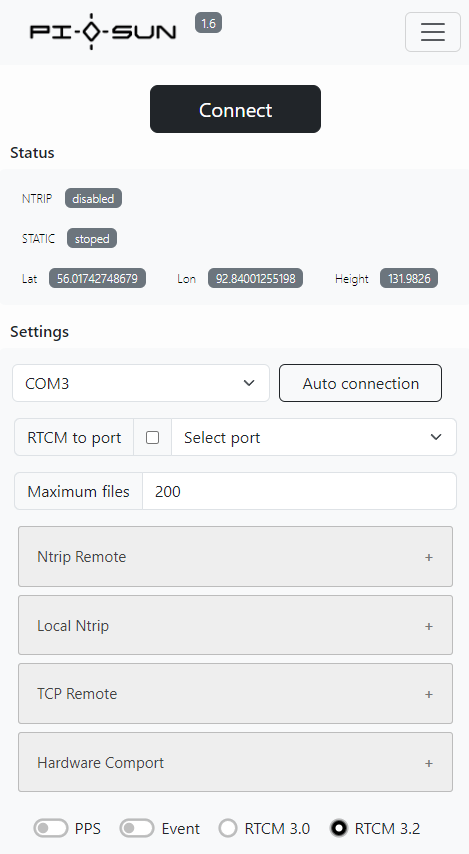
Connect - кнопка, при нажатии которой программа соединяется с выбранным com портом и пытается настроить устройство на выбранный вами режим работы.
Auto connection - функция автоподключения. Для использования этой функции необходимо установить ползунок Auto connection в активное положение, выбрать устройство к которому будет происходить подключение, а также установить остальные настройки по вашим требованиям. После этого необходимо нажать кнопку Save. Для проверки закройте программу и откройте заново. PiSun должен автоматически вернуться в активное состояние.
RTCM to port - функция для отправки RTCM пакетов в com порт. Список с com портами находится справа от кнопки.
Max files - в поле указывается максимальное количество файлов, которое будет храниться на устройстве. По достижению этого количества, ранее записанные файлы будут автоматически удаляться.
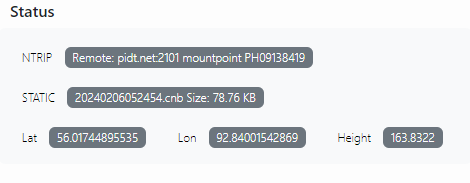
2. Статусы.
NTRIP - показывает статус работы кастера.
STATIC - показывает статус записи файла.
Lat, lon, Height - показывает текущие координаты, которое вещает устройство.
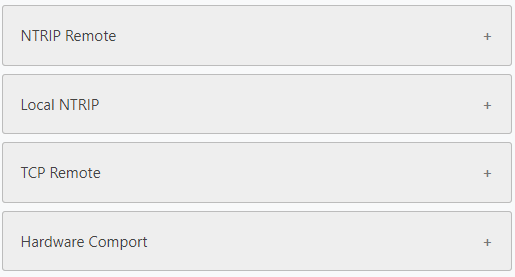
3. Выбор вещания.
NTRIP Remote - подключается к кастеру сети pidt.net:2101 или другому кастеру по вашему выбору. Если режим будет активирован, но данные для подключения не указаны, система по умолчанию установит соединение с кастером по адресу pidt.net:2101.
Local NTRIP - создаёт локальный кастер. Для соединения с кастером необходимо подключиться к точки доступа PH и ввести пароль/логин (1234). Если рядом с TCP установить галочку, то при выборе Local NTRIP также создается TCP сервер с указанным портом. Поле ввода TCP порта находится справа от кнопки TCP.
TCP Remote - подключение к TCP серверу для передачи поправок.
Hardware Comport - настройка внешних UART портов К803. Более подробно о настройке читайте в статье "Дополнительные настройки".
Local NTRIP|pidt.net:2101 - одновременное вещание на бесплатный кастер сети pidt.net и на локальный кастер.
4. Настройка PPS и Event.
PPS - настройка используется для синхронизации времени между геодезическим приемником и внешним устройством, например, лидаром. В данном случае это позволяет получить точное местоположение съёмки.
Event - эта настройка активирует режим получения событий в модуле K803. При подаче сигнала на пин event в файл cnb попадает метка со временем, в которое этот сигнал пришел.
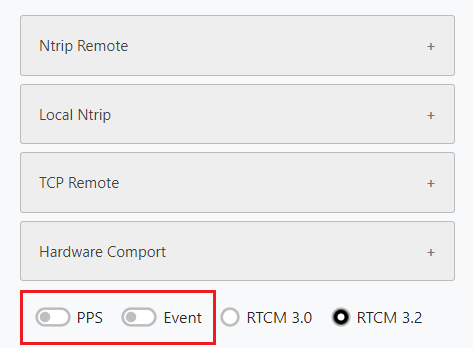
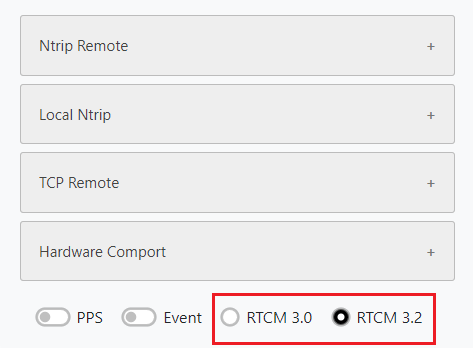
5. Выбор формата для RTCM.
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
5. Интеграция системы координат в поток поправок.
Сохранённые системы координат могут быть встроены в поток трансляции поправок. Для этого нажмите на кнопку "Coord System" на главном экране, затем выберите нужную систему координат из списка. После этого рядом с кнопкой "Coord System" появится название выбранной системы. Далее нажмите кнопку "Apply" и выберите желаемую частоту трансляции.
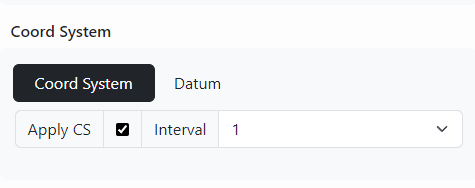
Как добавить системы координат читайте в статье "Система координат".
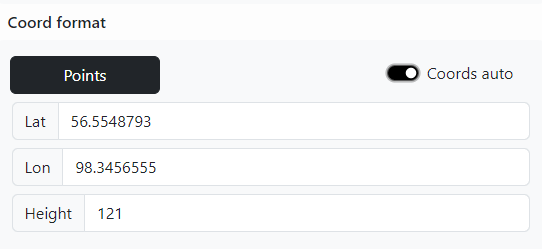
8. Настройка координат.
Сoords auto - устанавливает ориентировочные координаты, которые могут быть использованы, если точность фиксированных координат не является решающим фактором.
Lat, Lon, Height - поля для ввода координат в wgs84 формате.
Points - установка сохранённых координат.
Координаты прописываются в формате wgs84. Настройка координат должна производиться до нажатия кнопки Connect.
В PiSun RPI доступна функция внесения собственных координат. Подробную инструкцию по данному процессу можно найти в статье "Добавление точек".
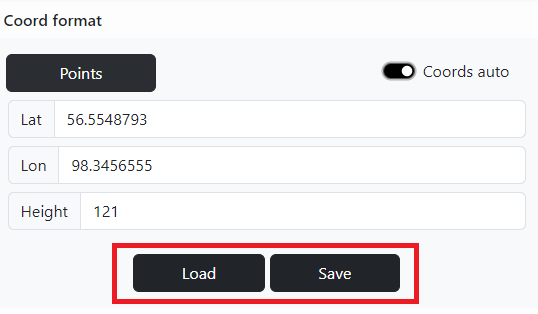
9. Сохранение и установка настроек.
Load - загружает последние настройки.
Save - сохраняет текущие настройки.
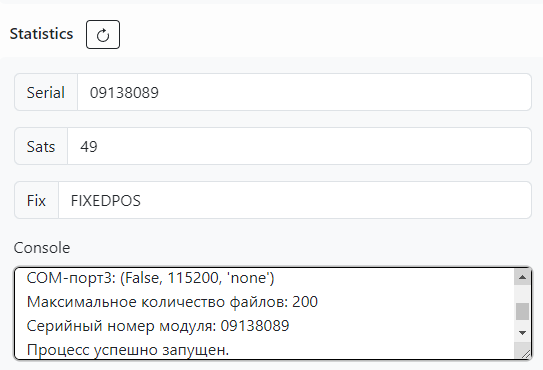
10. Вывод данных.
Serial - поле, предназначенное для отображения серийного номера устройства.
Sats - отображает количество спутников, которые принимает приемник.
Fix - указывает на текущий статус фиксированного решения.
Console - поле предназначено для вывода уведомлений о текущем состоянии работы программы, а также для отображения некоторых возможных ошибок.
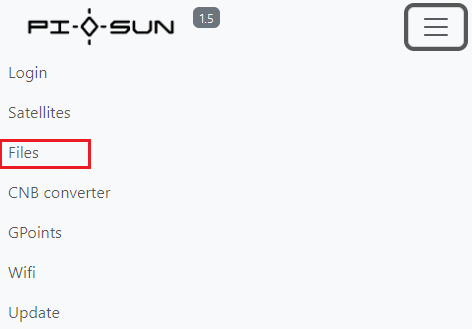
Скачать файлы
После установки соединения, программа автоматически начинает получать данные от приемника и сохраняет их в файл, который находится в разделе Files и имеет название "годмесяцденьминутасекунда.cnb". Файлы статики можно скачать и удалить напрямую с WEB интерфейса PiSunRPI. Полученные данные отправляются в бесплатный NTRIP-кластер pidt.net на порт 2101, либо в локальный кластер, в зависимости от выбора пользователя. На скриншоте красном цветом выделена кнопка для перехода в раздел Files .
Программа обеспечивает легкое и удобное взаимодействие с PiHatel и PiGo Lite, а также предоставляет возможность выбора способа передачи данных и настройки координат. Вы можете получить дополнительную информацию, задать вопросы, а также быть в курсе последних новостей и разработок в официальном Telegram чате PiSUN открытый код для PiGO.