Режимы работы приложения PiSatel
- Режим Static
- Режим Kinematic
- Режим NTRIP
- Режим Local NTRIP
- Режим Radio
- Режим фиктивного местоположения - Moсk Locations
Режим Static
Режим Статики
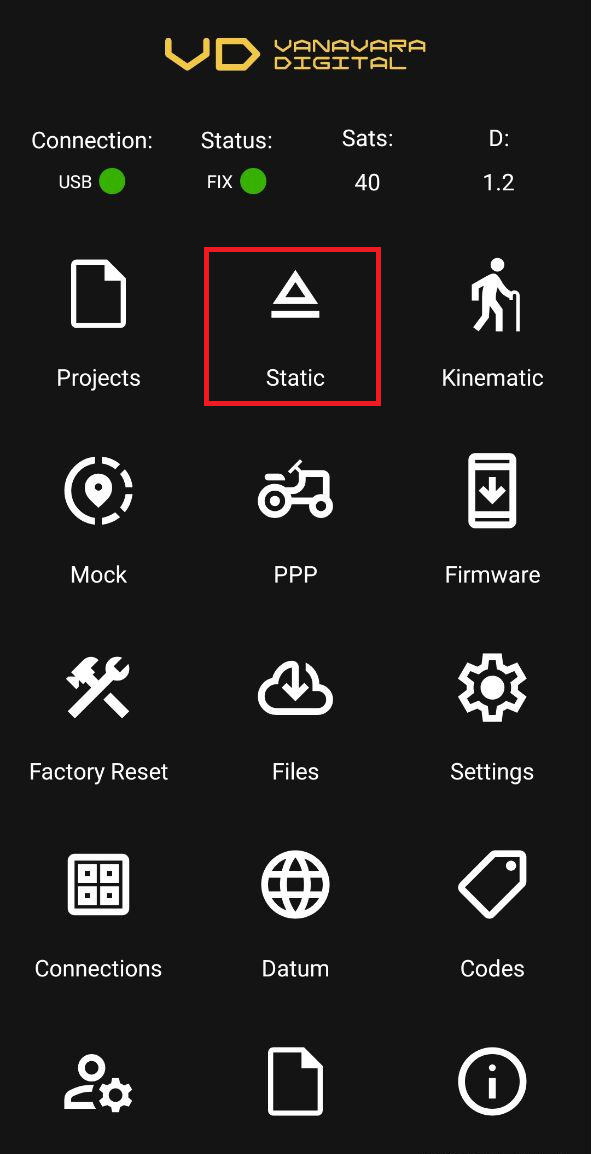
В данном режиме происходит запись спутниковых измерений в файл формата CNB. Приемник должен находиться в неподвижном состоянии. Для того чтобы начать запись данных, перейдите в раздел “Static” на главном экране. На скриншоте красным цветом выделена вкладка этого раздела.
Режим доступен при подключении к приёмнику через USB-соединение! Подробнее - в статье "Инструкция по подключению к приёмнику и настройке RTK".
Для записи статики нажмите кнопку "start recording CNB". После запуска на экране отобразится информация о количестве спутников в различных спутниковых группировках.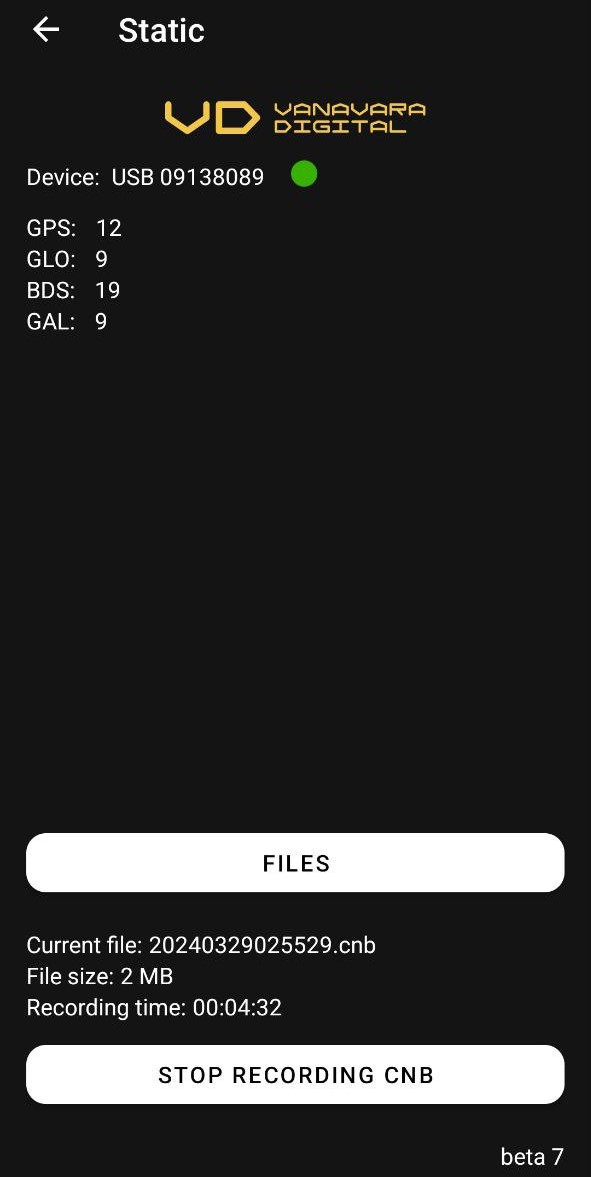
В процессе записи будут отображаться наименование файла, размер, время записи, а также серийный номер устройства. Файлы можно посмотреть в разделе “files” и отправить их в телеграмм.
Как работать с файлами статики вы можете узнать в книге Боты Vanavara Digital.
Режим Kinematic
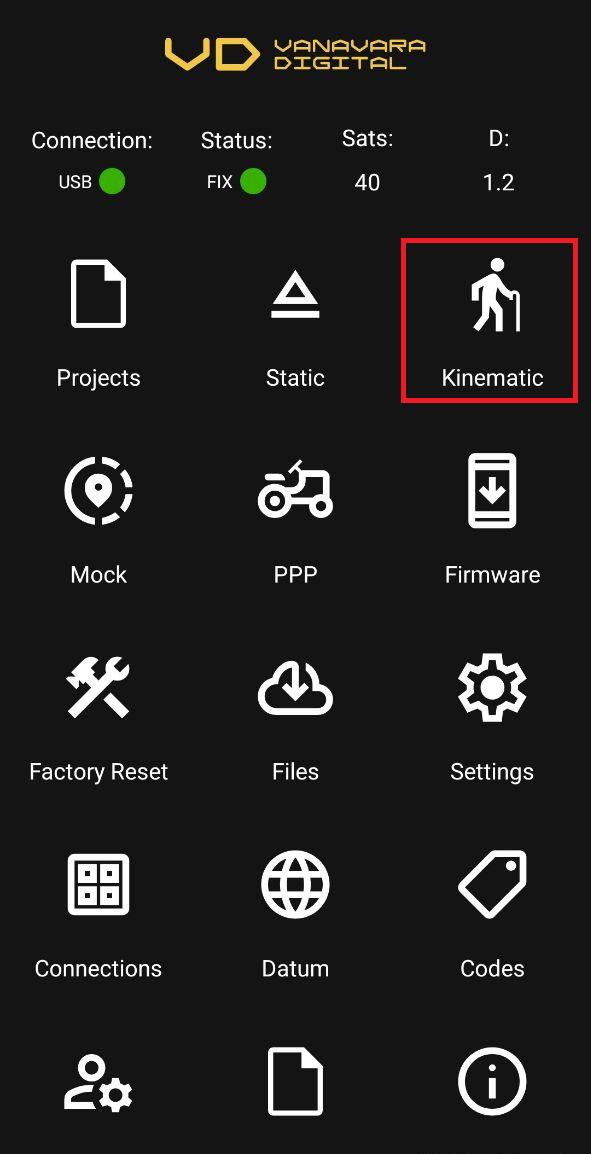
В режиме кинематики приложение записывает спутниковые измерения, при этом приемник может находиться в движении. Полученный файл может быть использован в последующей обработке методом PPK. Для работы с этим режимом, перейдите во вкладку "Kinematic" на главном экране.
Режим доступен при подключении к приёмнику через USB-соединение! Подробнее - в статье "Инструкция по подключению к приёмнику и настройке RTK".
Для начала записи нажмите кнопку "start recording kinematics".
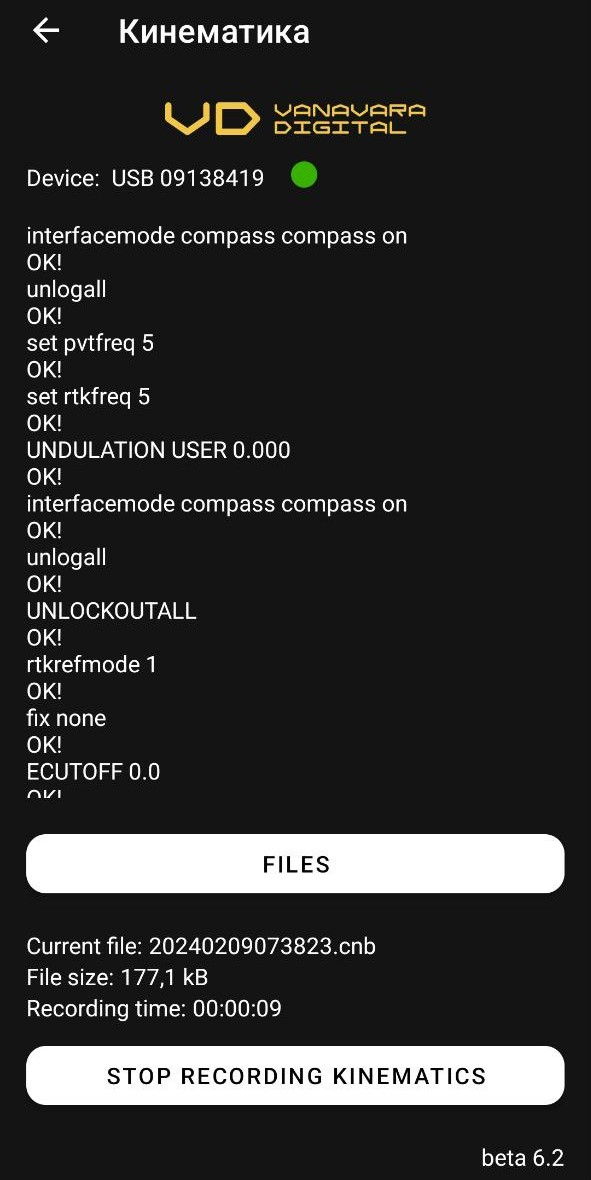
В процессе записи будут отображаться наименование файла, размер, время записи, а также серийный номер устройства. После остановки записи, вы можете просмотреть ваши файлы в разделе “files”.
Режим NTRIP
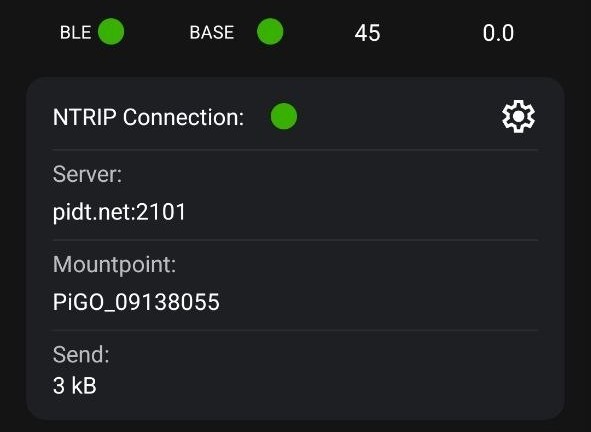
Режим NTRIP обеспечивает передачу дифференциальных поправок с устройства на бесплатный кастер сети pidt.net и позволяет использовать PiGO Lite в качестве базовой станции.
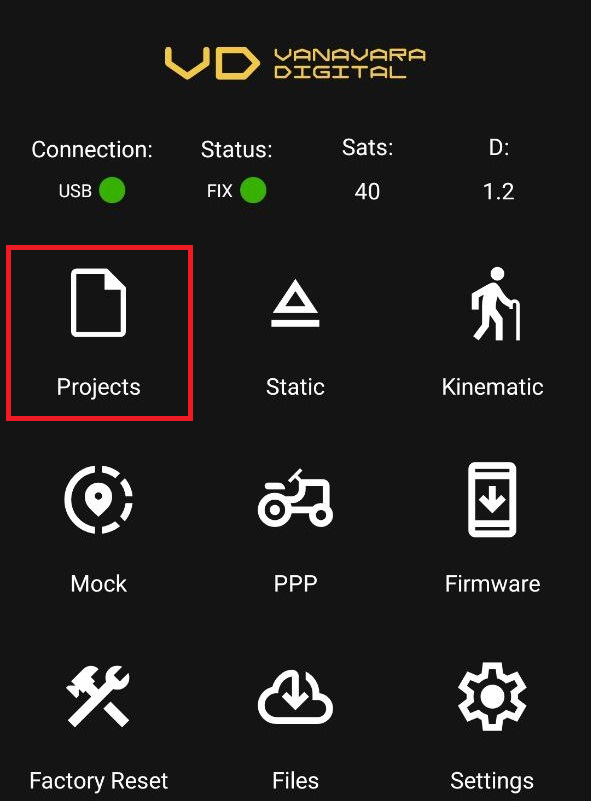
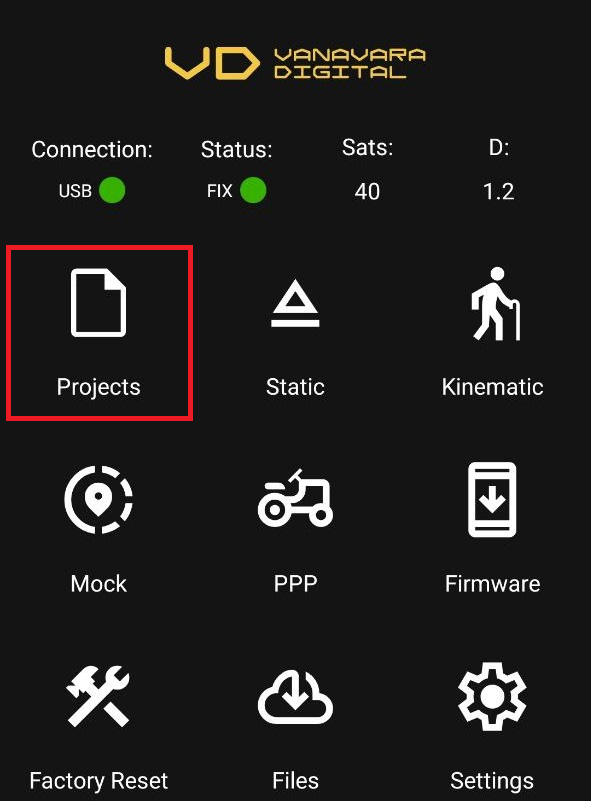
Режим NTRIP активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция NTRIP появится автоматически.

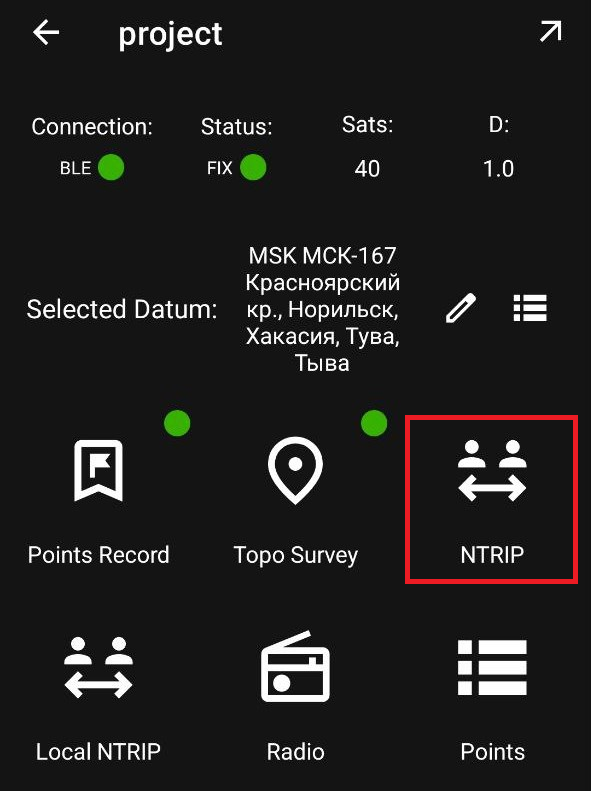
Для начала передачи поправок нажмите кнопку Start Streaming. При подключении устройства по USB станет доступна кнопка Start Recording для записи статики.
Перед началом работы, вы можете выбрать следующие параметры:
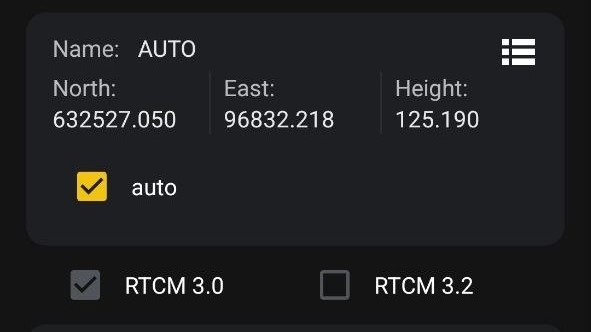
1. Координаты.
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points.
2. Формат для RTCM.
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
Подробнее о работе с бесплатным NTRIP кастером вы можете узнать в книге “Сеть РТК PiDATA”.
Режим Local NTRIP
В режиме Local NTRIP можно подключить приёмник в качестве базовой станции в локальной сети для передачи поправок с помощью протокола NTRIP. Один из сценариев использования - полёты дронов в режиме РТК. Для активации этого режима можно использовать два приёмника: один настроить как базовую станцию (локальный кастер) с помощью приложения PiSatel, второй - как ровер с помощью приложения 7Star.
Локальный кастер и ровер должны находиться в одной сети!
Режим Local NTRIP активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция Local NTRIP появится автоматически.
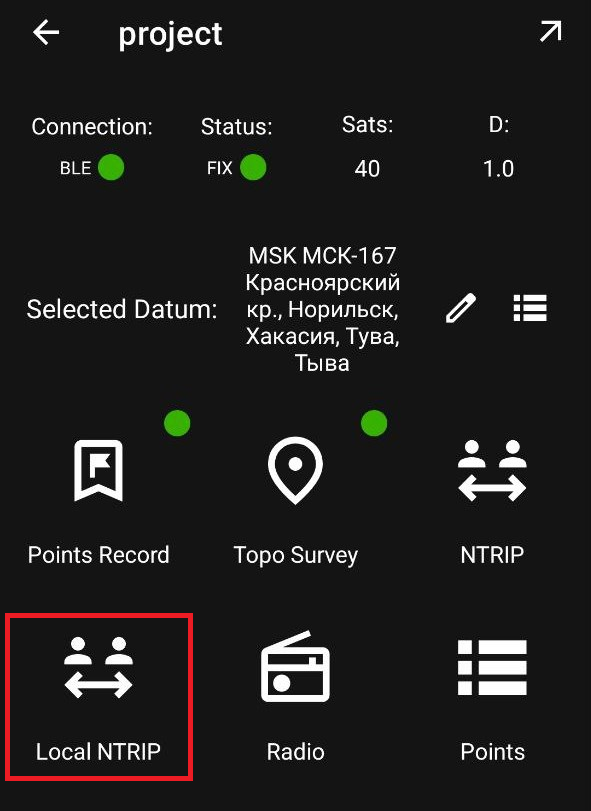
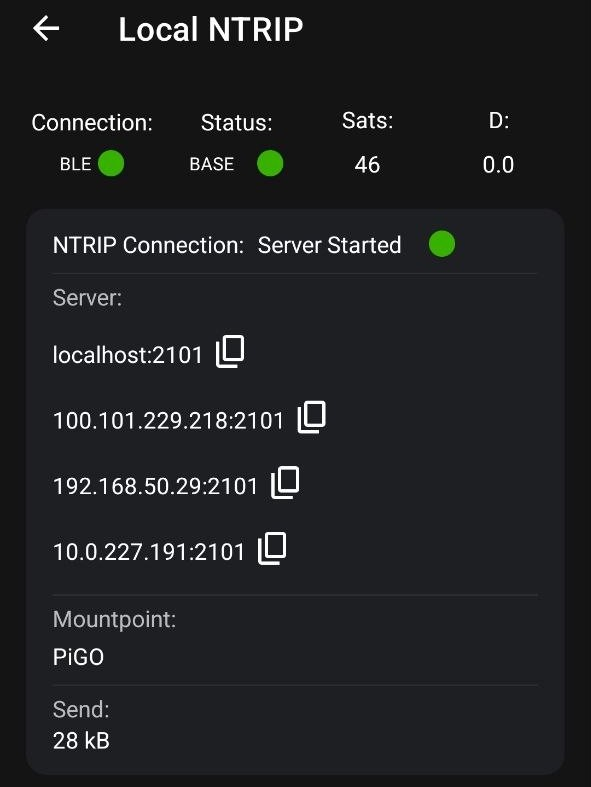
Для начала передачи поправок нажмите кнопку Start NTRIP. При подключении устройства по USB станет доступна кнопка Start Recording для записи статики.
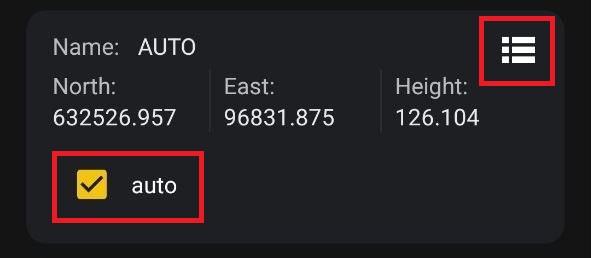
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points. Сохранить точку можно по кнопке рядом с координатами.
Чтобы подключить ровер к локальному кастеру, перейдите в 7Star в раздел "Ровер" и нажмите кнопку "Добавить". Введите данные для подключения и запросите список базовых станций кнопкой "Загрузить".
Данные для подключения:
- Хост: прописываем IP-адрес из приложения PiSatel.
- Порт: 2101.
- Логин и пароль: любые (например, 1234, проверка авторизации не требуется).
- Точка подключения: PIGO.
В статье "Быстрый старт" вы можете узнать, как подключить приёмник в качестве ровера в приложении 7Star.
Режим Radio
Небольшая инструкция, как с помощью ПО PiSatel настроить PiGO Lite в режиме базовой станции для передачи поправок по радиоканалу.
Что необходимо для данного режима работы:
- PiGO Lite в режиме базовой станции
- PiRat в режиме передачи
Порядок работы:
Настройте приёмник PiGO Lite, как базовую станцию.
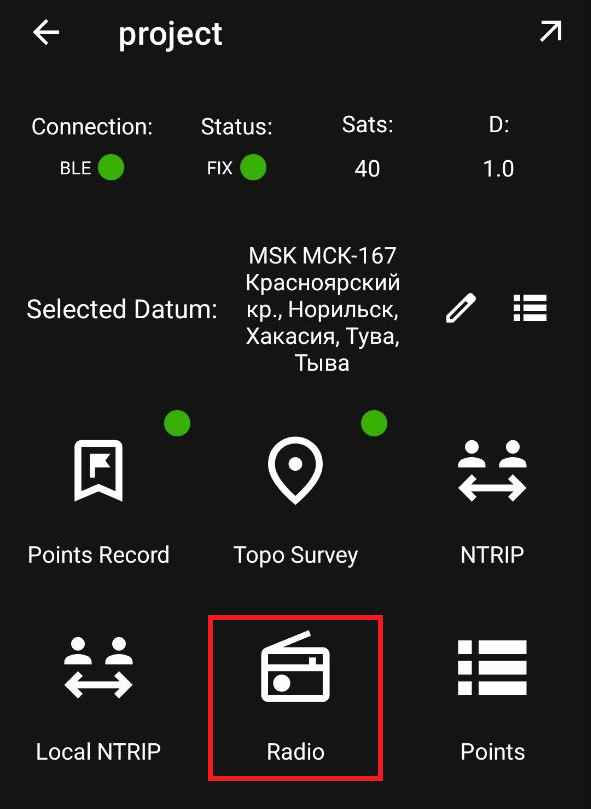
Режим Radio активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция Radio появится автоматически.
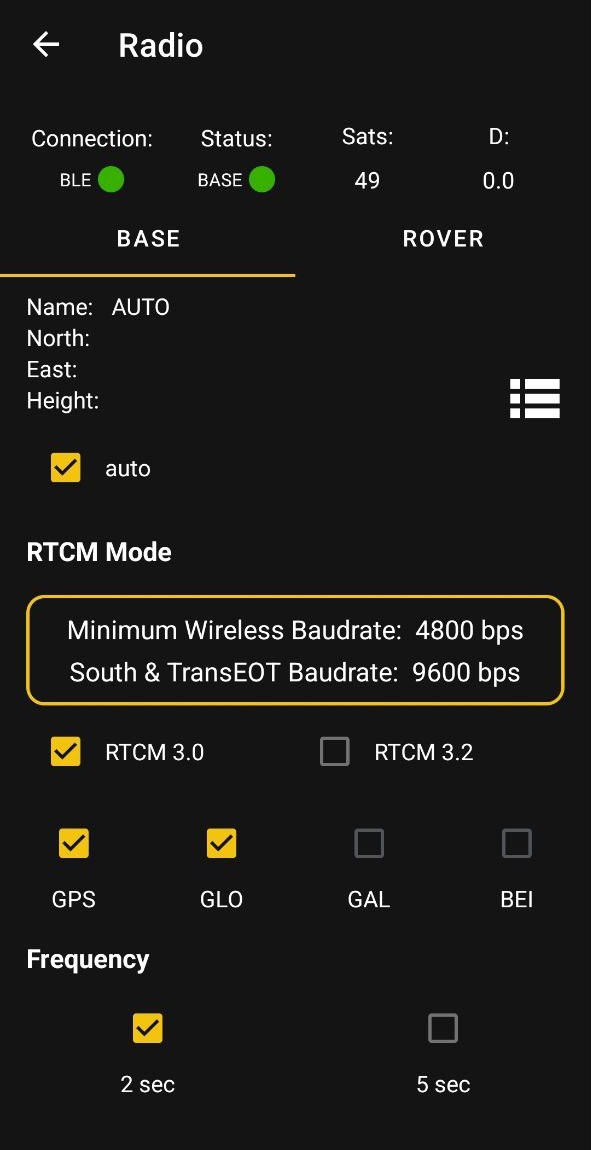
Выберите необходимые настройки:
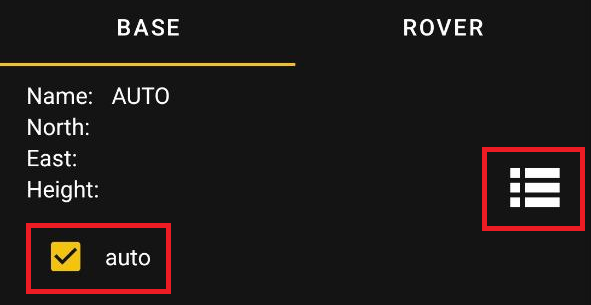
1. Настройка координат:
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points.
2. Настройка формата RTCM:
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
GPS, GLO, GAL, BEI : выберите спутниковую группировку.
Frequency - выберите дискретность вещания поправок.
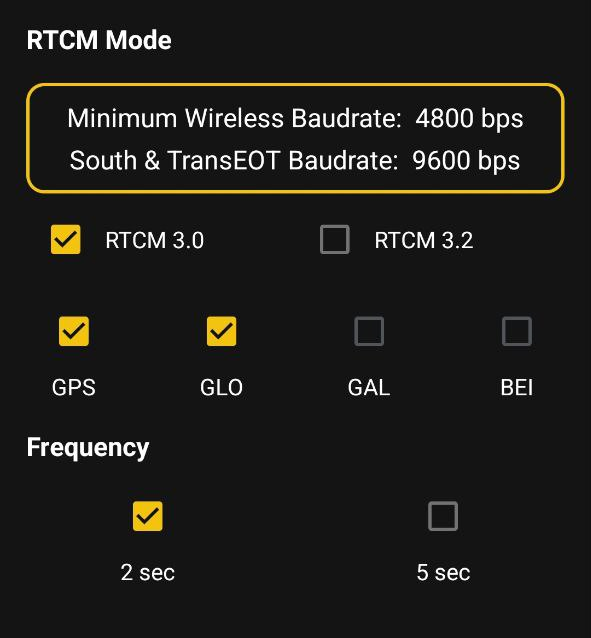
3. Нажмите кнопку “Set” для установки настроек.
Настройте PiRat в режиме передачи.
Подключите приёмник PiRat и настройте его на передачу, как показано на скриншоте. Затем сохраните выбранные настройки.
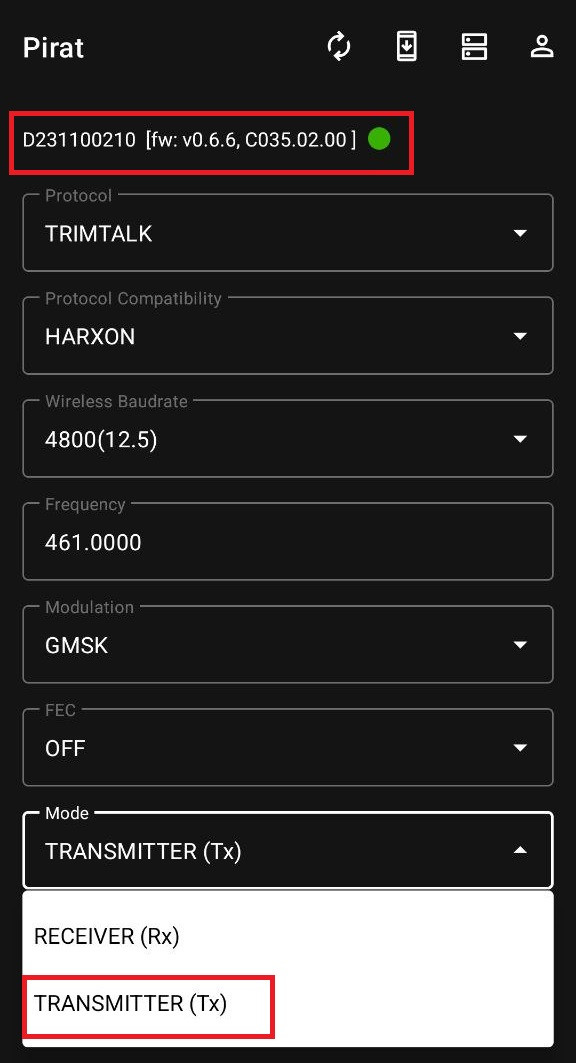
О работе приёмника УКВ PiRat можно ознакомиться в статьях "PiRat в качестве базовой станции" и "PiRat в качестве ровера".
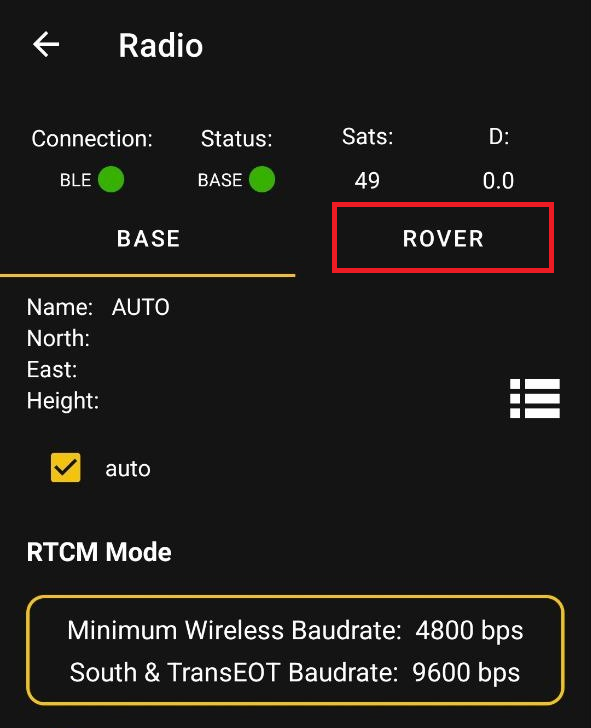
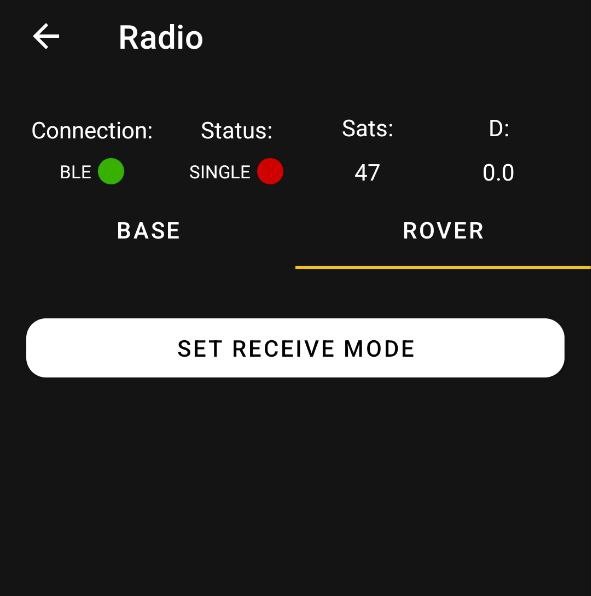
Для того, чтобы перевести PiGO Lite в режим ровера перейдите во вкладку "Rover" и активируйте настройки по кнопке "set receive mode". Убедитесь, что статус приёмника обновился. Если изменений нет, переподключитесь к устройству.
Режим фиктивного местоположения - Moсk Locations
Mock Locations - это режим, позволяющий приложению PiSatel эмулировать GPS-координаты устройства. Данная функция подменяет реальные данные о местоположении, полученные от GPS-модуля и сотовой сети, на координаты, транслируемые приёмником PiSatel.
Режим полезен для тестирования приложений, проверки геозависимого функционала и отладки ПО без физического перемещения устройства.
Предварительные требования
- Установлено приложение PiSatel;
-
Выполнено сопряжение мобильного устройства с GNSS-приёмником;
-
Настроено RTK-соединение (при необходимости).
Подробная инструкция по подключению и настройке RTK доступна в статье "Инструкция по подключению к приёмнику и настройке RTK".
Пошаговая настройка режима Mock
1. Запустите приложение PiSatel и перейдите во вкладку Mock на главном экране.

2. Настройка прав доступа
При первом входе в режим Mock необходимо предоставить приложению специальные разрешения:
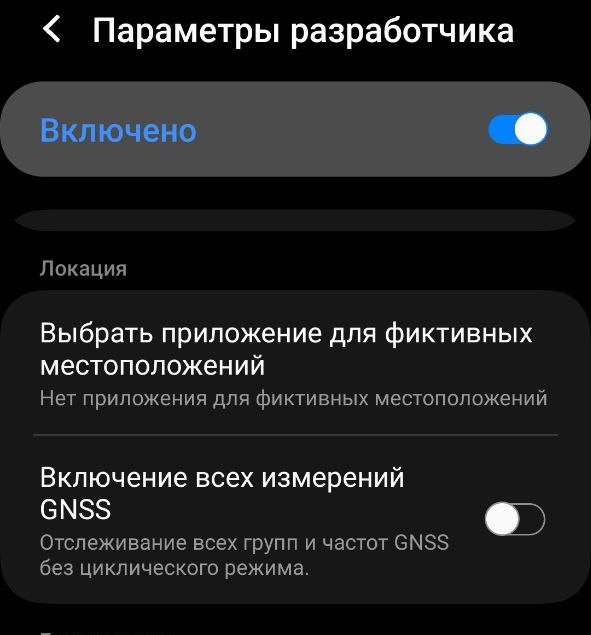
- Включите режим разработчика на вашем мобильном устройстве (если ещё не включён);
- В настройках для разработчиков найдите пункт "Фиктивные местоположения" (Mock Locations) и активируйте его;
- В появившемся системном уведомлении подтвердите переход в настройки;
- В списке приложений для эмуляции местоположения выберите PiSatel.
При переходе во вкладку Mock приложение автоматически запросит включение этой настройки. Следуйте подсказкам на экране.
3. Запуск эмуляции
- После настройки прав доступа нажмите кнопку "Start";
- Дождитесь появления системного уведомления об активации фиктивного местоположения.
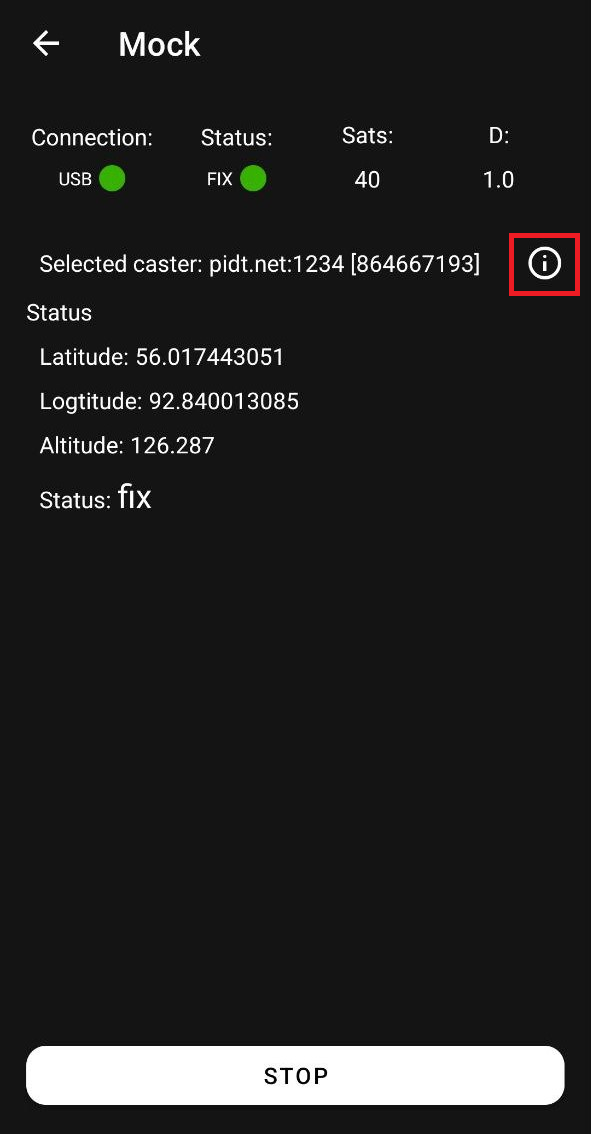
4. Мониторинг параметров
После успешного запуска режима на экране отобразятся:
- Фиктивные координаты
- Статус решения
Точность координат, дистанцию от базовой станции (Distance) и принимаемые пакеты (Received) вы можете просмотреть, нажав на кнопку, выделенную на скриншоте ниже.
Если настройка “фиктивное местоположение” выключена, режим будет не активен!
Для того чтобы проверить корректно ли работает подмена координат, вы можете перейти в ГИС приложение и проверить местоположение. В режиме Mоcк вы увидите очень точное местоположение на карте. В статье Области применения PiGO Lite вы можете прочитать как использовать подмену координат в фотограмметрии.