PiSatel - геодезия с PiGO
В разделе описана работа и функционал приложения для взаимодействия с ГНСС приемниками PiGO.
- Возможности приложения PiSatel
- Инструкция по подключению к приёмнику и настройке RTK
- Руководство по созданию и управлению проектами
- Режимы работы приложения PiSatel
- Режим Static
- Режим Kinematic
- Режим NTRIP
- Режим Local NTRIP
- Режим Radio
- Режим фиктивного местоположения - Moсk Locations
- Точки: съёмка, хранение, управление
- Настройка RTK подключения
- Системы координат и калибровки
- Авторизация в сервисах PIDT.NET
Возможности приложения PiSatel
Приложение Pisatel_beta_1.1, разработанное компанией Vanavara Digital, предназначено для работы с ГНСС приемниками PiGO. Это программное обеспечение позволяет осуществлять запись спутниковых измерений в режимах статики и кинематики, а также передавать дифференциальные поправки на бесплатный NTRIP кастер сети pidt.net.
ПО разработано под Андроид и его можно скачать по ссылке PiSatel_beta 1.1, все выпущенные версии приложения можно посмотреть здесь.
Ключевые возможности программы:
-
Запись данных в режиме статики: Запись данных даже при выключенном экране устройства.
-
Запись данных в режиме кинематики: Поддерживается запись данных с частотой 5 Гц, время GNSS синхронизируется со временем Android.
-
NTRIP вещание: Позволяет передавать RTCM поправки в кастер pidt.net или на локальный кастер, а также использовать PiGO Lite как базовую станцию.
-
Моделирование данных (Mock - РТК подмена координат): Идеально подходит для ГИС приложений, батиметрии, предусмотрена работа в режиме РТК и PPP.
-
Настройка режима РРР: Возможность включать и выключать режим РРР и выбирать поставщика поправок: Galileo HAS или Beidou B2b.
- Обновление модуля Comnav K803: Возможность обновлять устройства на модуле Comnav K803.
-
Настройка формата: Возможность выбора формата градусов координат.
- Добавление точек и РТК сетей: Добавление, удаление и редактирование точек и РТК сетей.
- Съёмка и запись точек.
Режимы работы приложения:
Режим Статики
В данном режиме происходит запись спутниковых измерений в файл формата CNB. Подробнее о режиме читайте в статье "Режим Static".
Режим Кинематики
В режиме кинематики приложение записывает спутниковые измерения, при этом приемник может находиться в движении. Полученный файл может быть использован в последующей обработке методом PPK. Как работать в этом режиме читайте в статье "Режим Kinematic".
Режим NTRIP
В этом режиме вы можете отправлять дифференциальные поправки с устройства на бесплатный кастер сети pidt.net, а также использовать PiGO Lite как референсную базовую станцию. Дополнительную информацию о режиме можно найти в статье "Режим NTRIP".
Режим Local NTRIP
В режиме Local NTRIP можно подключить приёмник в качестве базовой станции в локальной сети для передачи поправок с помощью протокола NTRIP. Один из сценариев использования — полёты дронов в режиме РТК. Если вас интересует больше подробностей о режиме, обратитесь к статье "Local NTRIP".
Режим Mock
Режим Mock позволяет подменить данные о расположении вашего телефона на точные координаты, полученные с приемника PiGO. В статье о режиме "Moсk Locations" можно узнать более подробную информацию.
Режим Radio
Режим Radio позволяет настроить PiGO Lite в режиме базовой станции для передачи поправок по радиоканалу.
Настройки приложения:
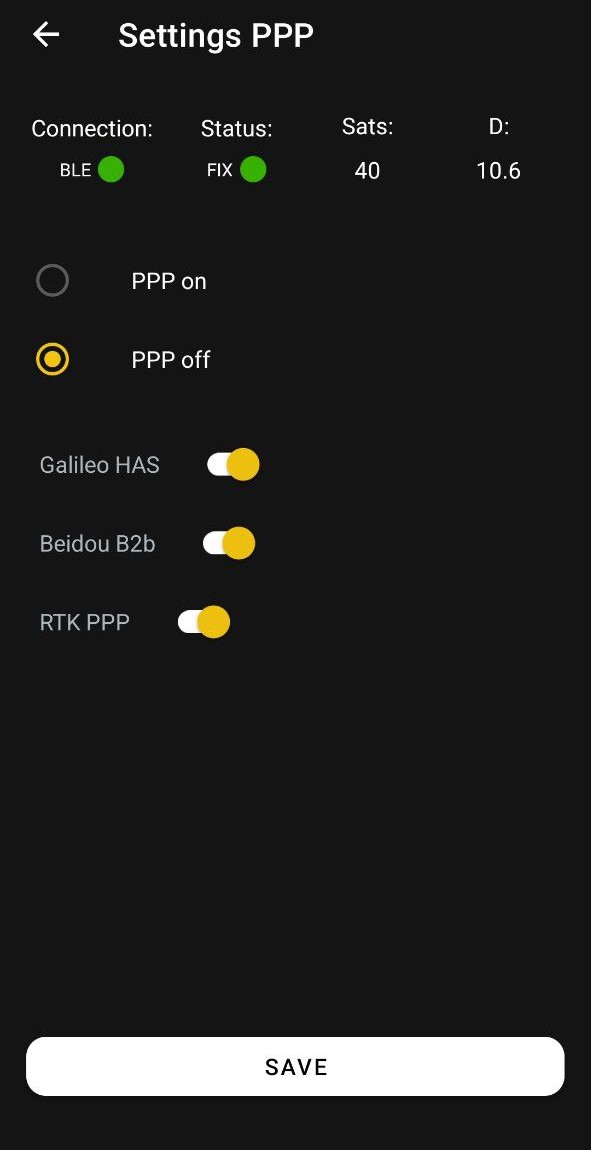
Настройка PPP
PPP режим даёт возможность работать с ГНСС-приемником без базовой станции в непосредственной близости от пользователя. Метод PPP отличается от стандартного Single решения повышенной точностью. Данный режим используется для получения высокоточных поправок с помощью ГНСС сигналов Galileo HAS и Beidou B2b.
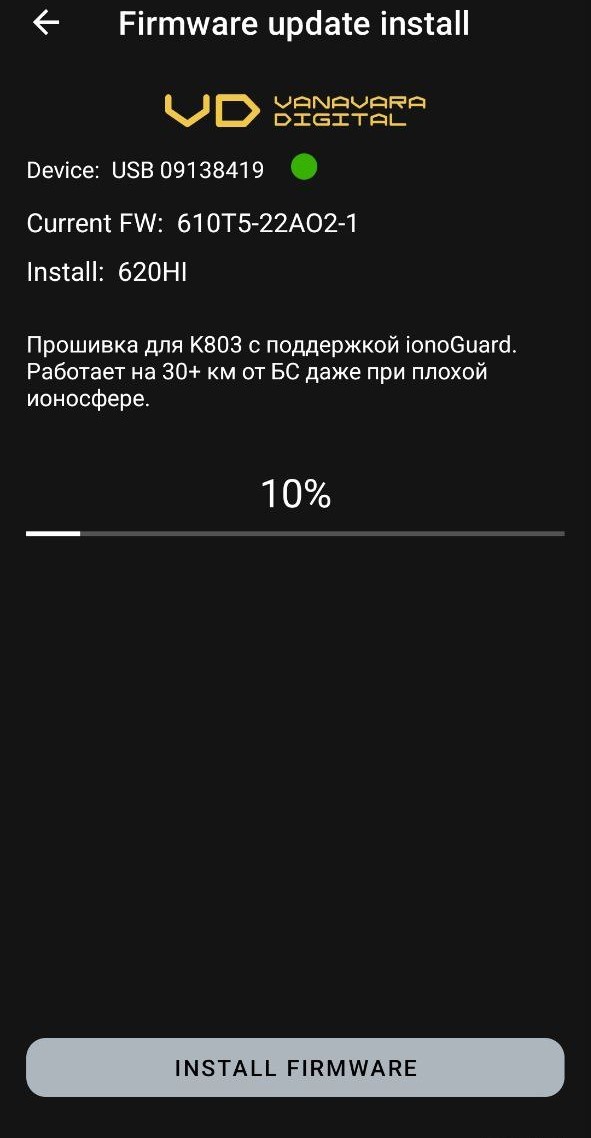
Обновление модуля К803
В разделе "Firmware" вам доступны следующие возможности: просмотр текущей прошивки модуля К803 и ее обновление. Для этого достаточно выполнить простую последовательность действий. Выберите желаемую версию прошивки и нажмите кнопку "install firmware" для ее установки. Чтобы убедиться, что модуль успешно обновлен, вернитесь в раздел "Firmware" и обратите внимание на статус "Current FW".
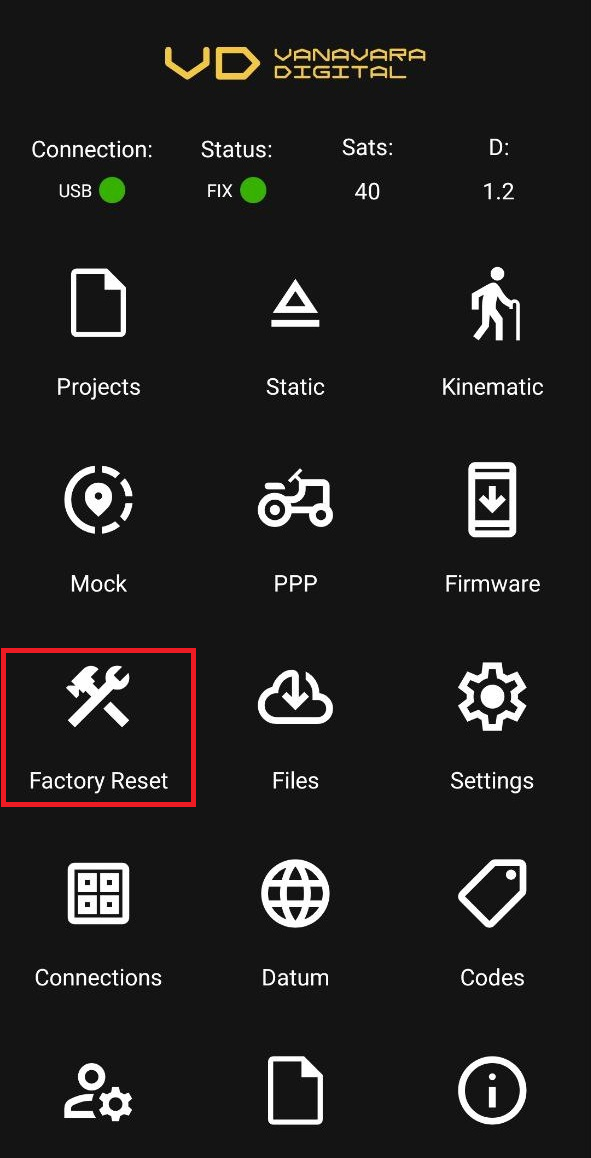
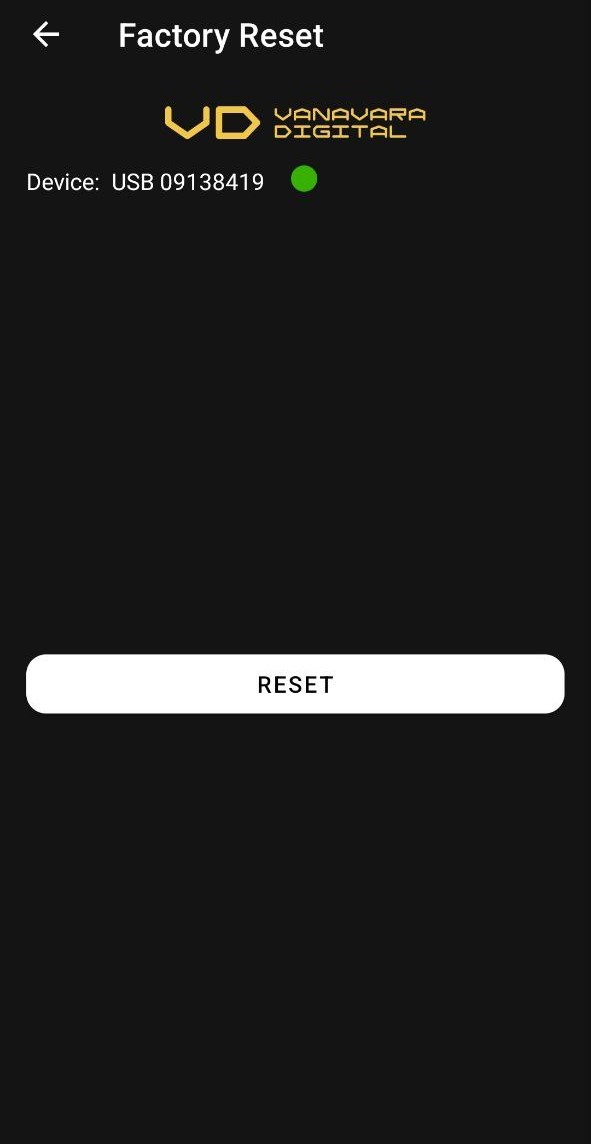
Сброс настроек
В разделе "Factory Reset" вам доступна функция сброса устройства к его изначальным заводским настройкам, путем нажатия на кнопку "reset".
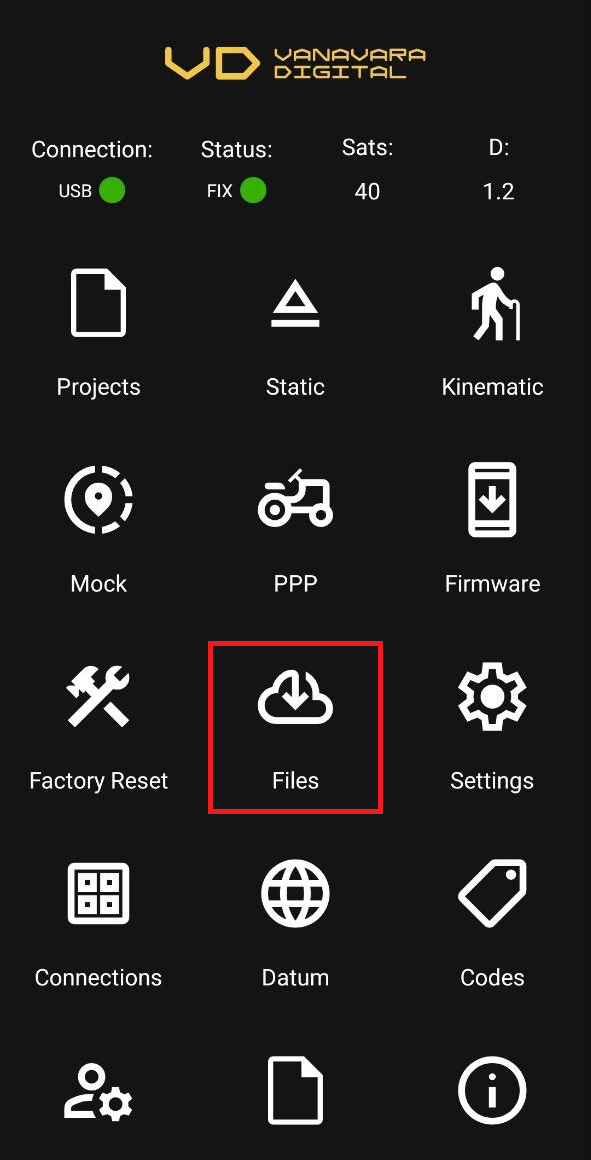
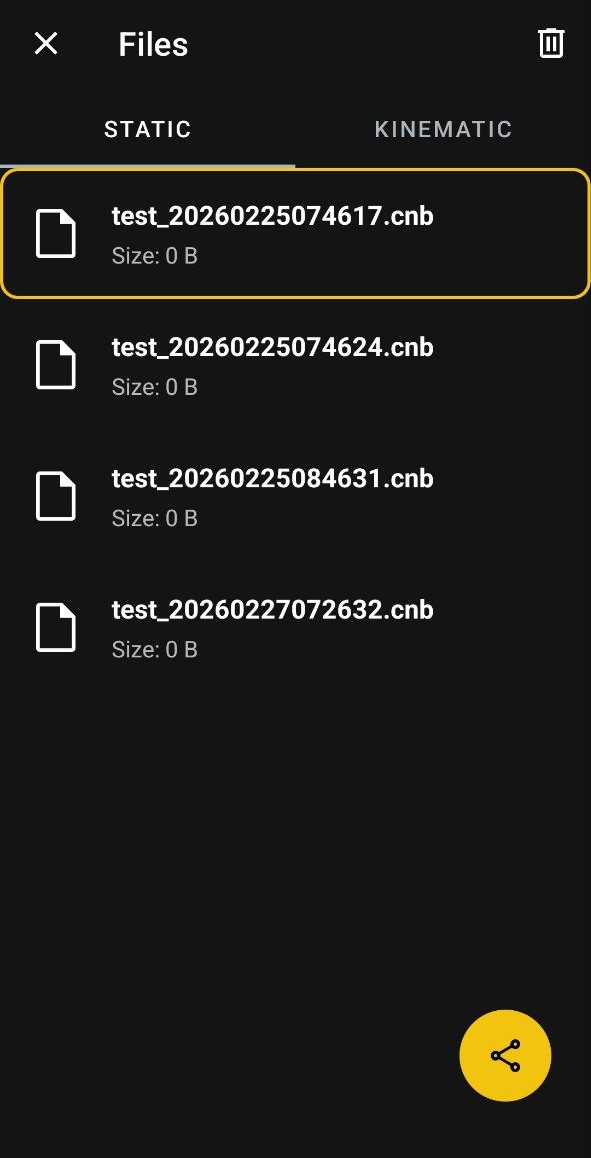
Работа с файлами
В приложении раздел "Files" предоставляет возможность работать с файлами статики и кинематики. Длительное нажатие на файл позволяет отправить или удалить его.
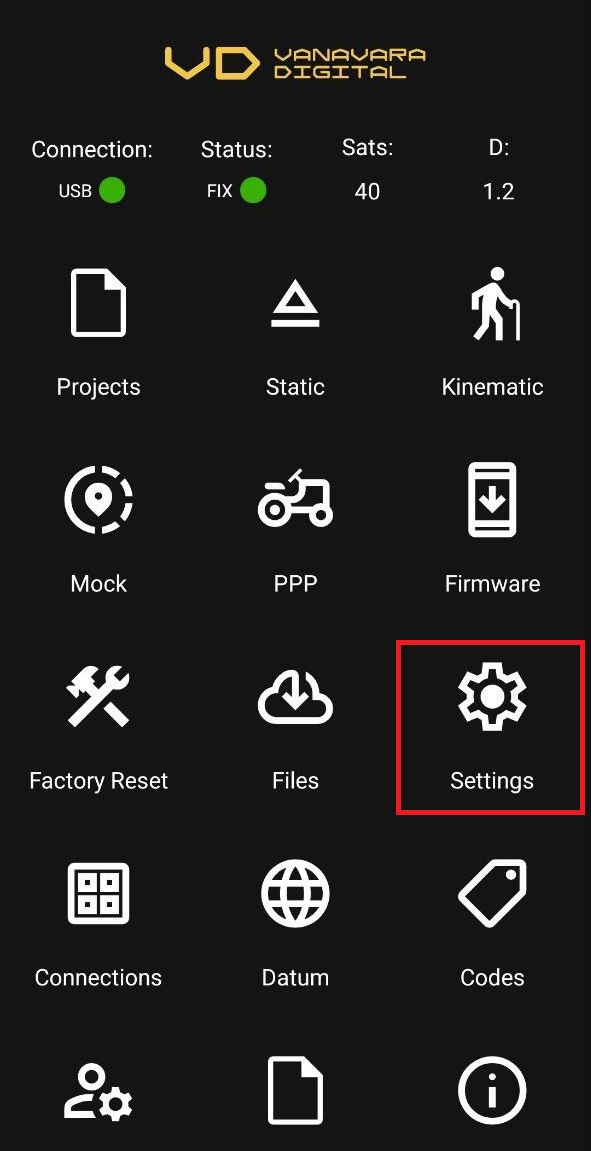
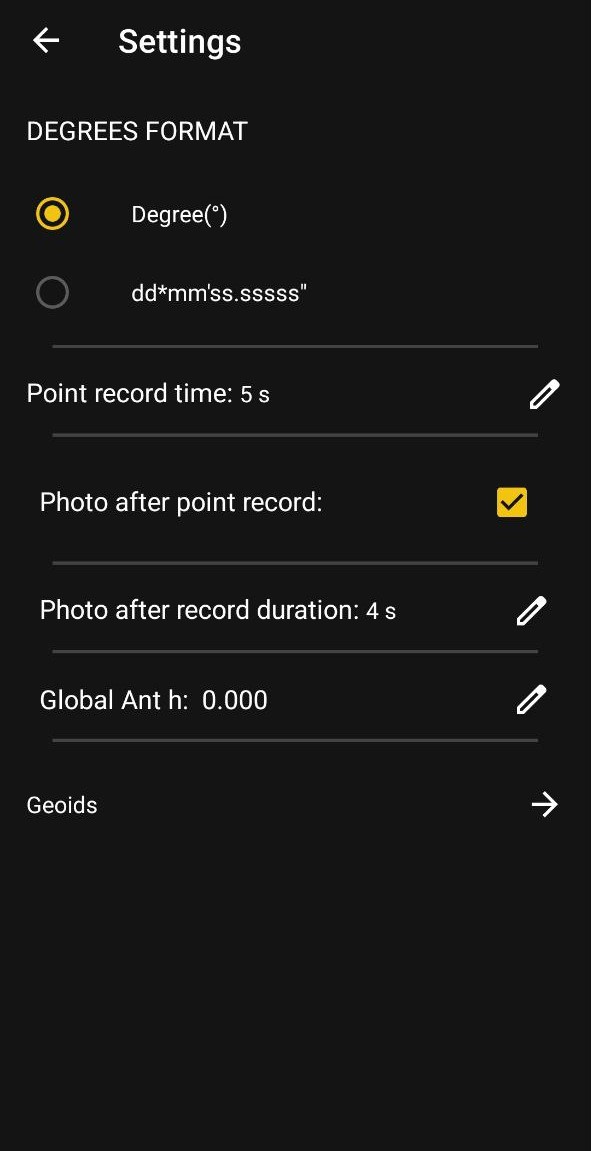
Настройки
В разделе есть возможность выбрать следующие настройки:
- Формат координат (Градусы / Десятичные градусы)
-
Параметры для съёмки точек
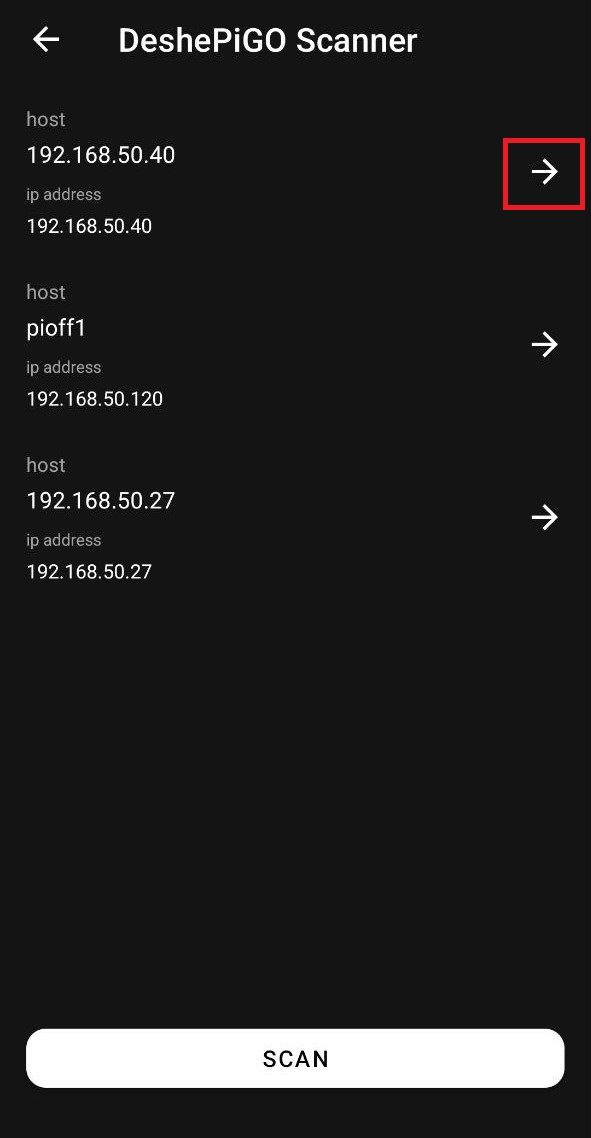
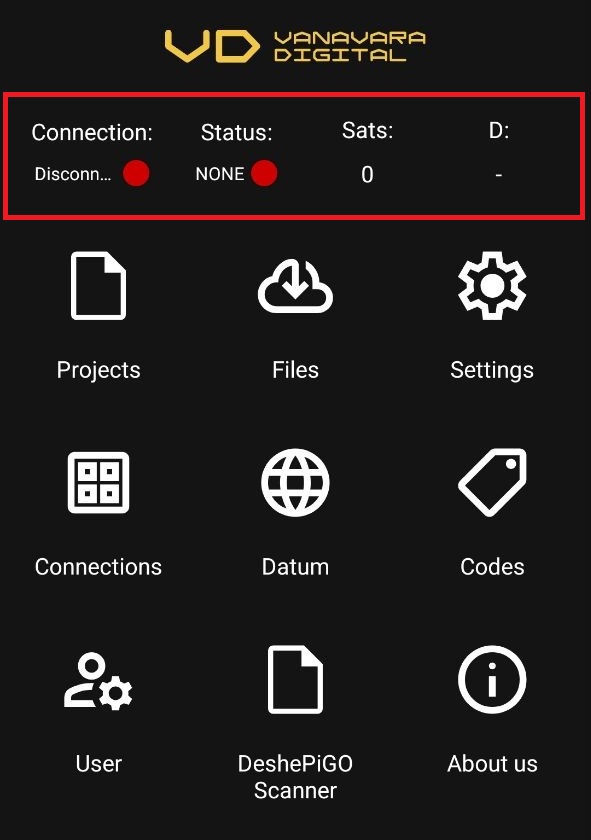
Сканер DeshePiGO
В разделе "DeshePiGO Scanner" вы сможете обнаружить приемники DeshePiGO и подключиться к ним. При нажатии кнопки, выделенной на скриншоте, вы будете перенаправлены на веб-интерфейс DeshePiGO. Как работать с приёмниками DeshePiGO, читайте в статье "Быстрый старт!".
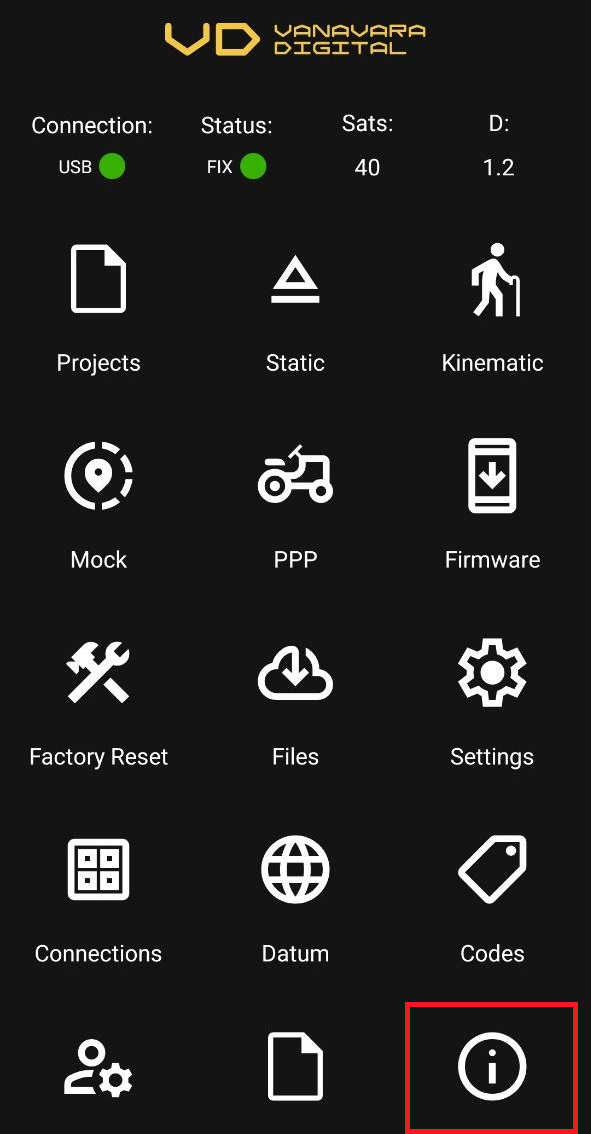
Обновление приложения
В разделе "About us" у вас есть возможность обновить приложение PiSatel до самой свежей версии. Проверить наличие новых обновлений можно, нажав на кнопку "check app updates".
Приложение PiSatel от компании Vanavara Digital представляет собой мощный инструмент для расширения возможностей ГНСС приемников PiGO. Обеспечивая запись спутниковых измерений в различных режимах и передачу дифференциальных поправок на NTRIP кастер, оно демонстрирует высокий уровень функциональности и удобства использования, делая процесс навигации более точным и эффективным.
Инструкция по подключению к приёмнику и настройке RTK
Данное руководство описывает процесс подключения мобильного устройства к приёмнику, а также настройку получения поправок через NTRIP-кастер для работы в режиме RTK.
Подключение к приёмнику
Для начала работы необходимо установить соединение между приложением и оборудованием.
1. Запустите приложение PiSatel и перейдите на главный экран.
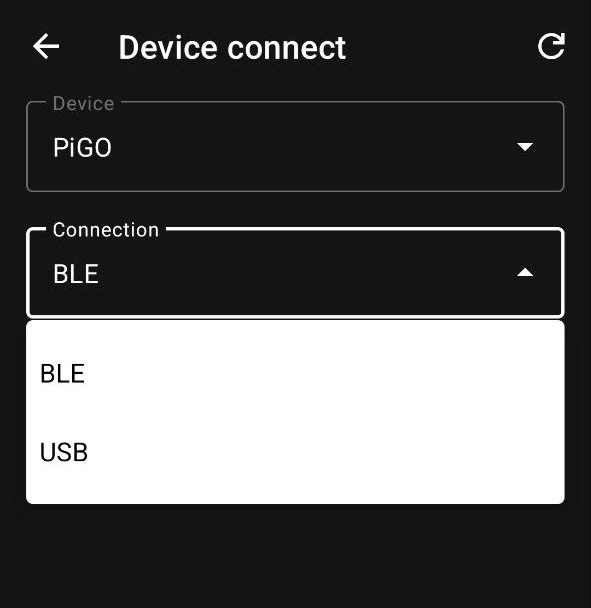
2. Нажмите на поле статуса подключения.
3. В открывшемся меню выберите тип соединения: BLE (Bluetooth) или USB.
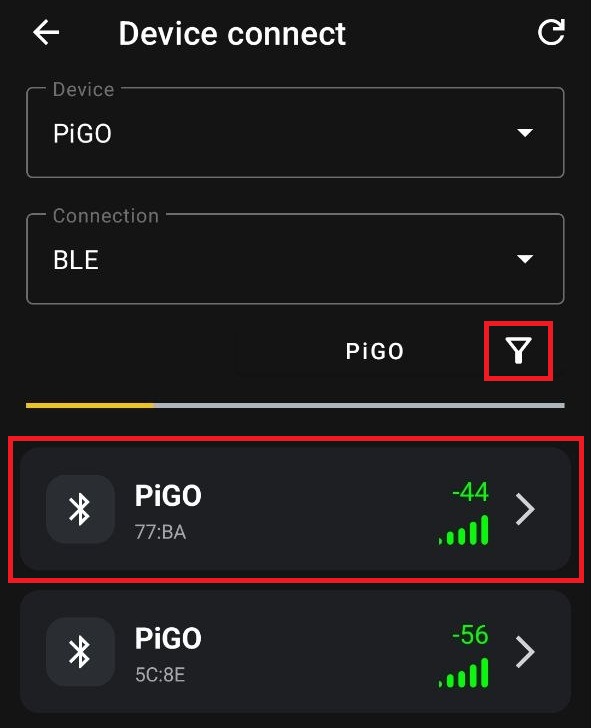
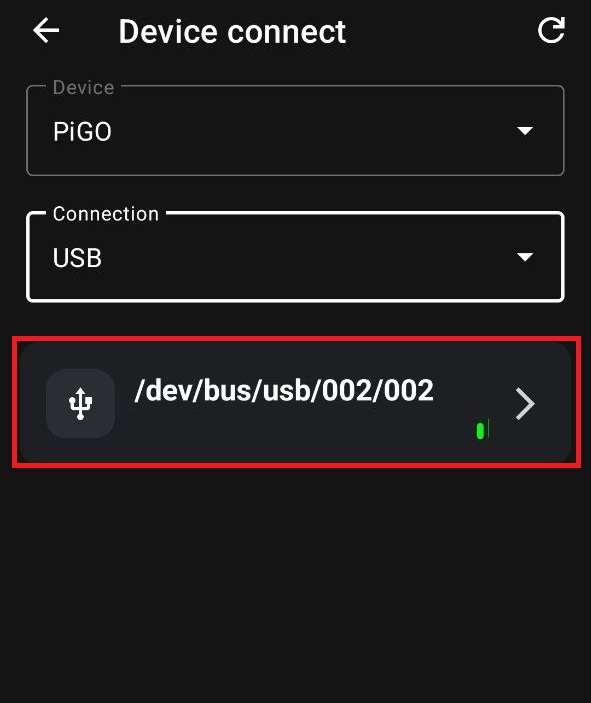
4. Дождитесь отображения списка доступных устройств. Выберите свой приёмник и нажмите на него, чтобы установить соединение. Для быстрого поиска приёмников PiGO воспользуйтесь фильтром.
Настройка подключения к NTRIP-кастеру
Для получения дифференциальных поправок и работы в режиме RTK необходимо настроить подключение к NTRIP-кастеру.
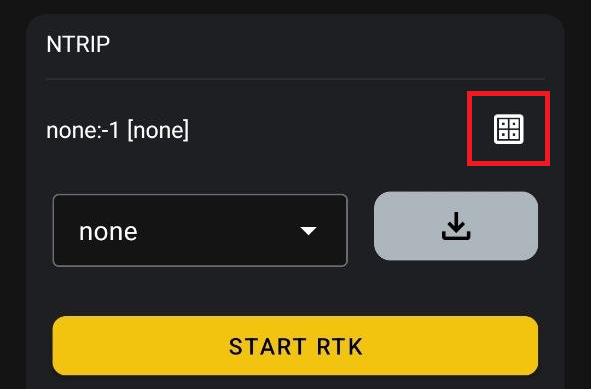
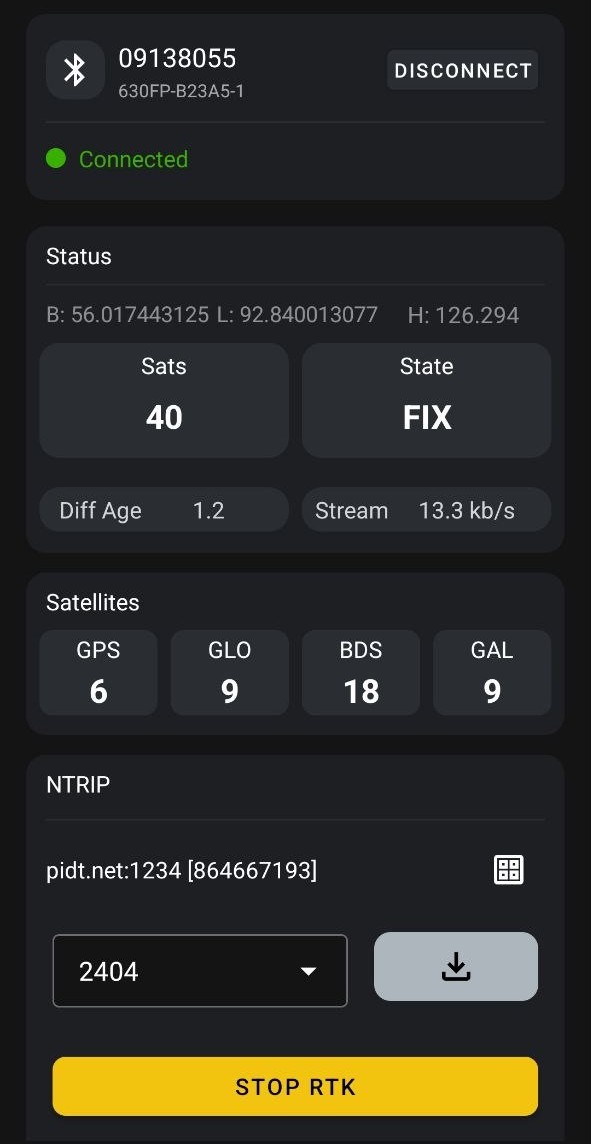
1. После успешного подключения к приёмнику откроется окно приложения, содержащее информацию о состоянии устройства: количество спутников, тип решения, возраст поправок, серийный номер и версию прошивки. Перейдите в раздел NTRIP.
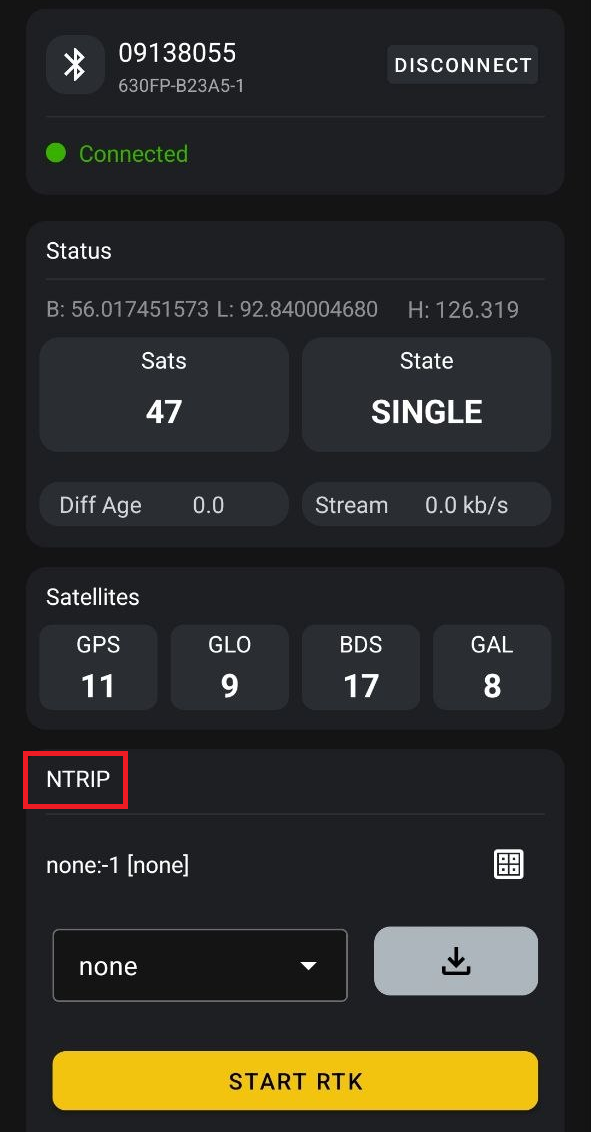
2. Нажмите кнопку, отмеченную на рисунке, чтобы открыть окно настройки параметров подключения.
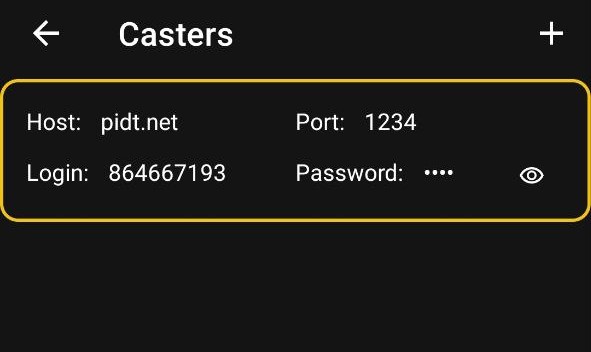
3. Введите данные для подключения к сети RTK. В качестве примера можно использовать сервис pidt.net:
- Хост:
pidt.net; - Порт:
1234или2101; - Имя пользователя и пароль: предоставляются через Telegram-бот PiDATA User Bot.
Подробное описание процесса добавления нового кастера приведено в статье «Настройка RTK-подключения».
4. После ввода параметров вернитесь на предыдущий экран с помощью кнопки «Назад».
5. Нажмите кнопку «Загрузить» и выберите из списка требуемую базовую станцию (mountpoint).
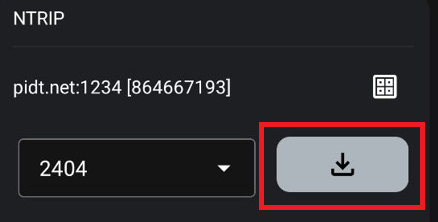
6. Для запуска приёма RTK-поправок нажмите кнопку Start RTK.
7. После успешного подключения убедитесь, что в поле State отображается режим FLOAT или FIX, что свидетельствует о корректном получении поправок и работе приёмника в режиме RTK.
Важное ограничение!
Обратите внимание на особенности работы при разных типах подключения:
При подключении через USB: Доступен полный функционал приложения.
При подключении через BLE: Функции записи статики и кинематики будут недоступны.
Руководство по созданию и управлению проектами
Предварительные требования
Перед созданием проекта убедитесь, что выполнены следующие условия:
- Приложение установлено: На вашем мобильном устройстве установлена актуальная версия PiSatel;
- Подключение выполнено: Установлено соединение между устройством и GNSS-приёмником;
- RTK настроен: При необходимости настроено RTK-соединение для получения точных координат.
Подробная инструкция по подключению и настройке RTK доступна в статье "Инструкция по подключению к приёмнику и настройке RTK".
Создание нового проекта
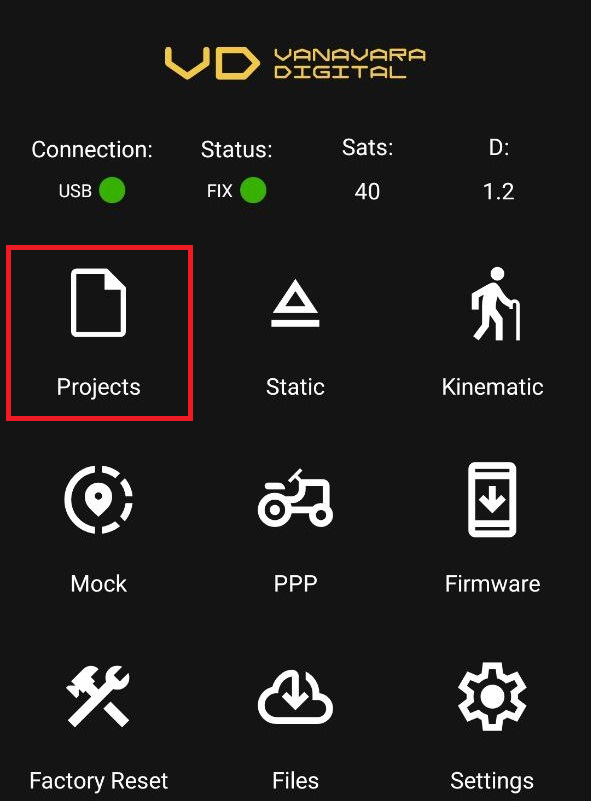
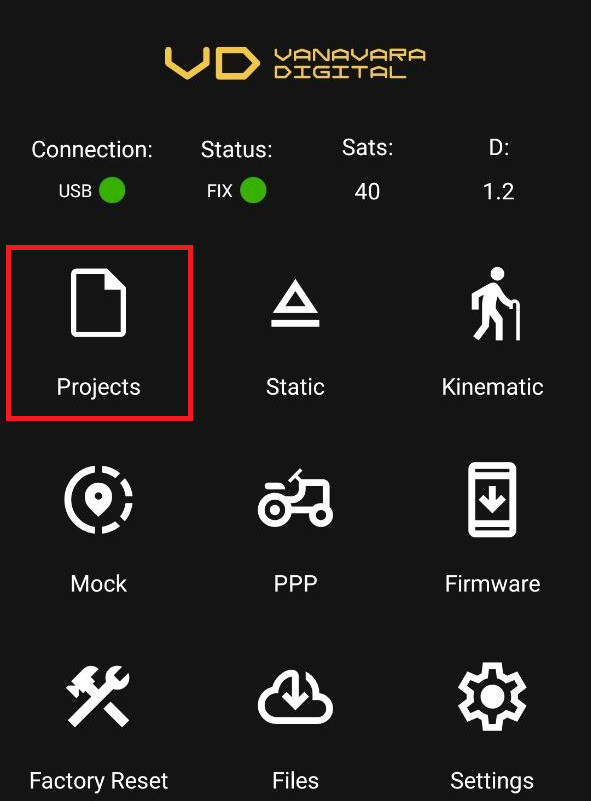
Шаг 1. Запуск и навигация
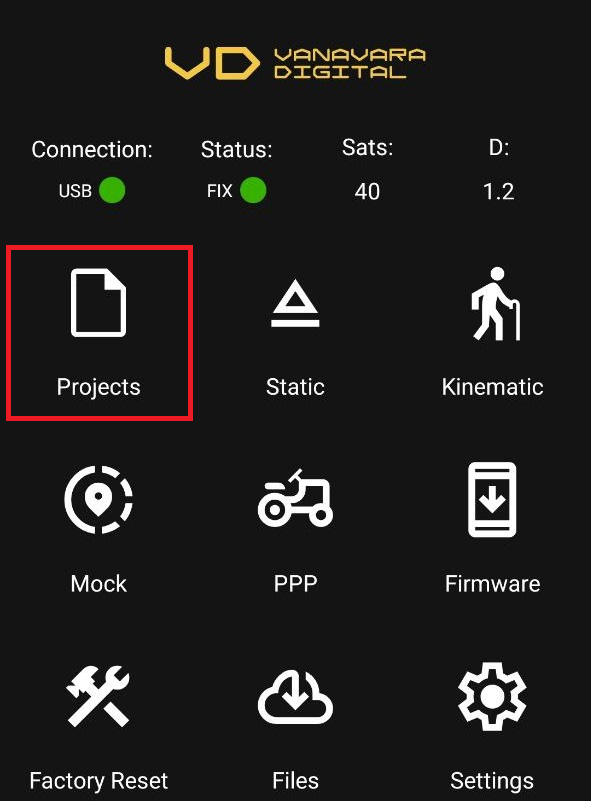
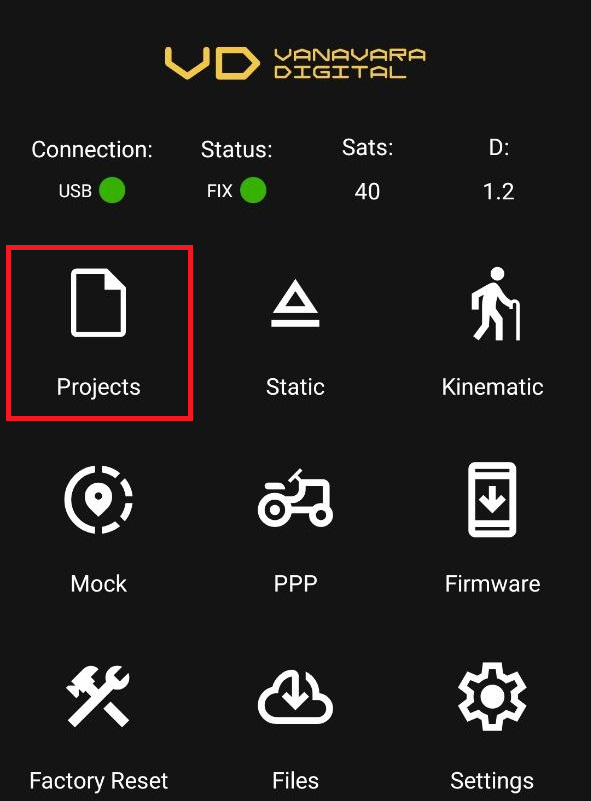
- Откройте приложение “PiSatel”;
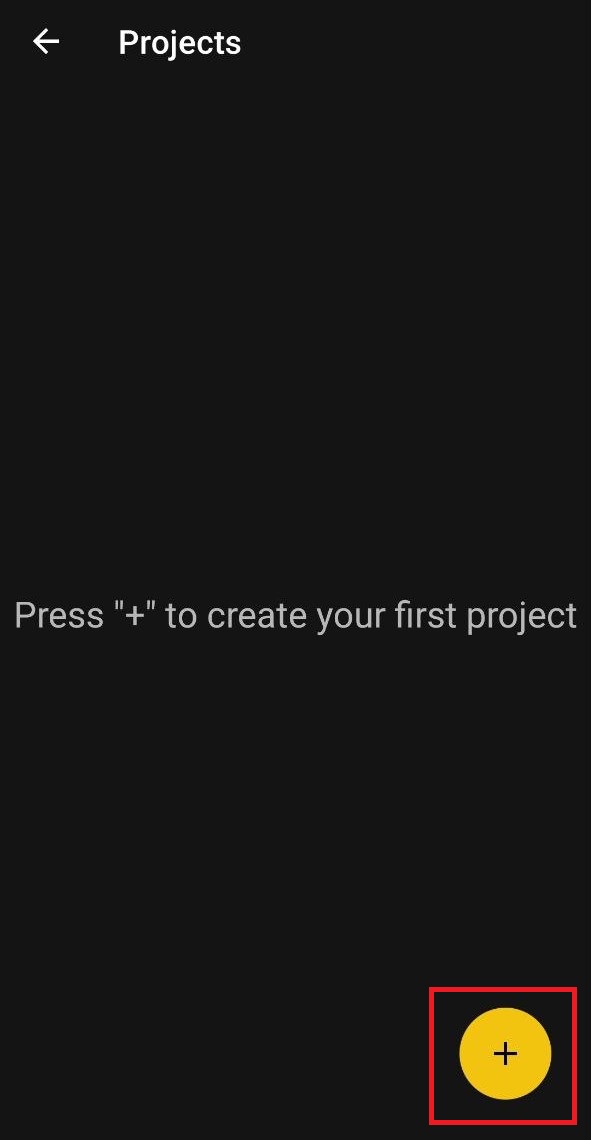
- В главном меню перейдите во вкладку “Projects”.

Шаг 2. Добавление проекта
- Нажмите кнопку “+” для создания нового проекта;
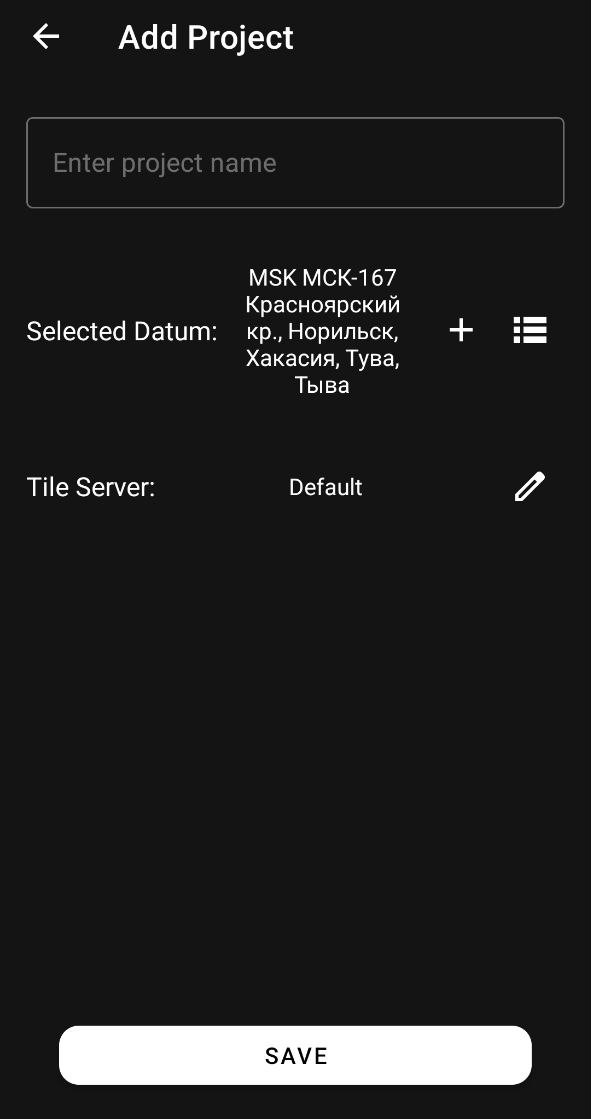
- В открывшемся окне введите “Имя проекта”;
- Выберите “Систему координат” (Selected Datum).
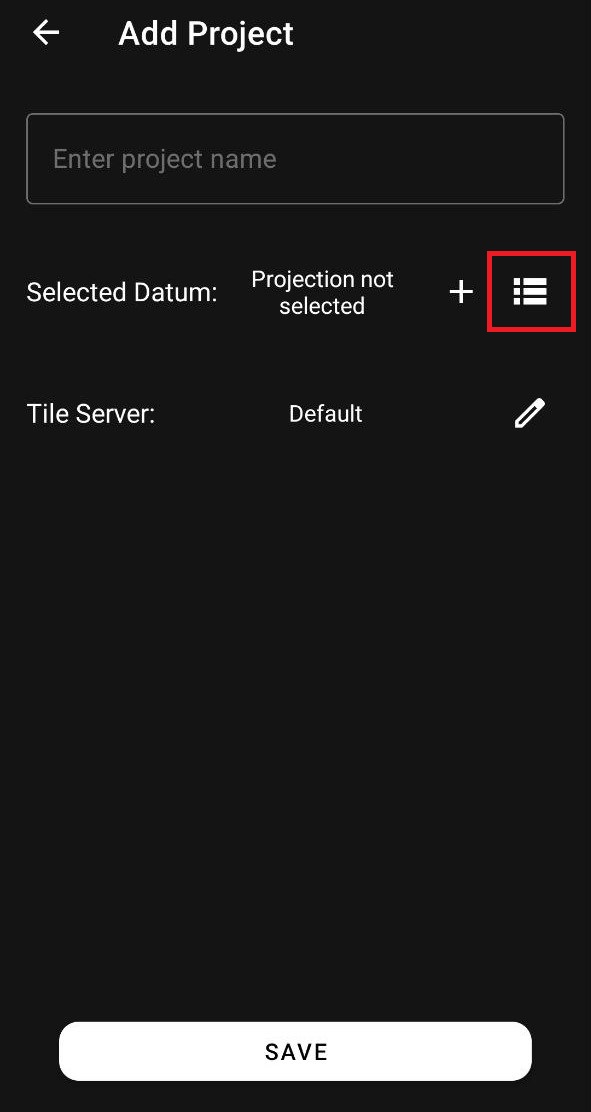
Выбор правильной системы координат критически важен для точности измерений. Инструкция по добавлению и настройке систем координат доступна в статье “Системы координат и калибровки”.
Шаг 3. Сохранение
- Нажмите кнопку “Save”;
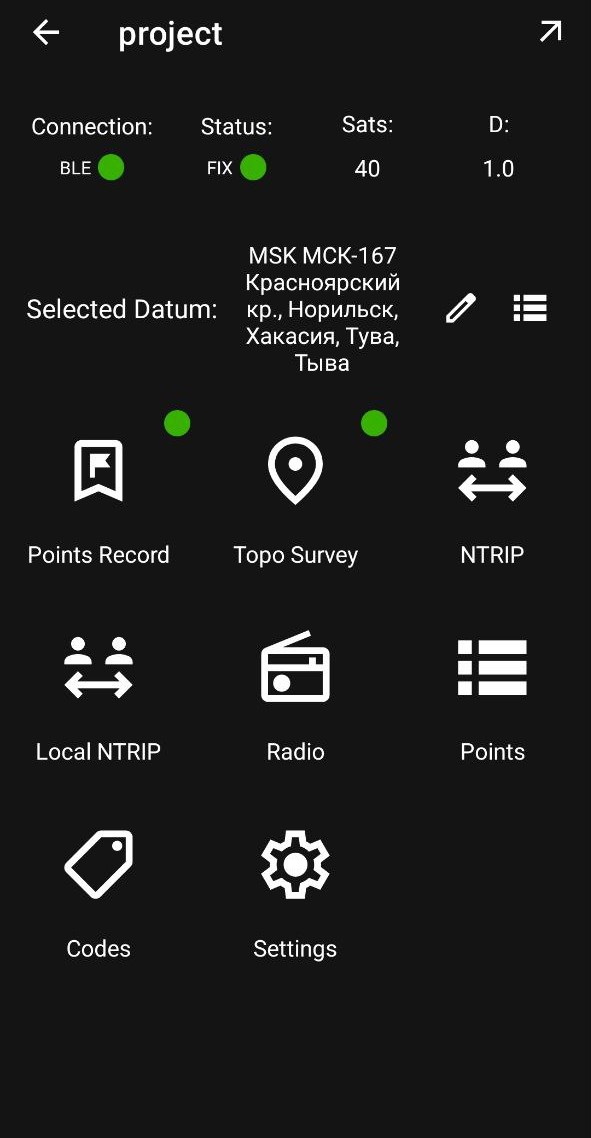
- После сохранения приложение автоматически перейдет в интерфейс созданного проекта.
После создания проекта вам становится доступен набор инструментов для работы с данными. В нижней панели отображаются следующие режимы и настройки:
- Points Record: Режим записи точек
- Topo Survey: Режим топографической съемки
- NTRIP: Настройки подключения к NTRIP-серверу
- Local NTRIP: Настройки локального NTRIP-сервера
- Radio: Настройки радиоканала (UHF)
- Points: Просмотр и управление сохраненными точками
- Codes: Управление кодами объектов
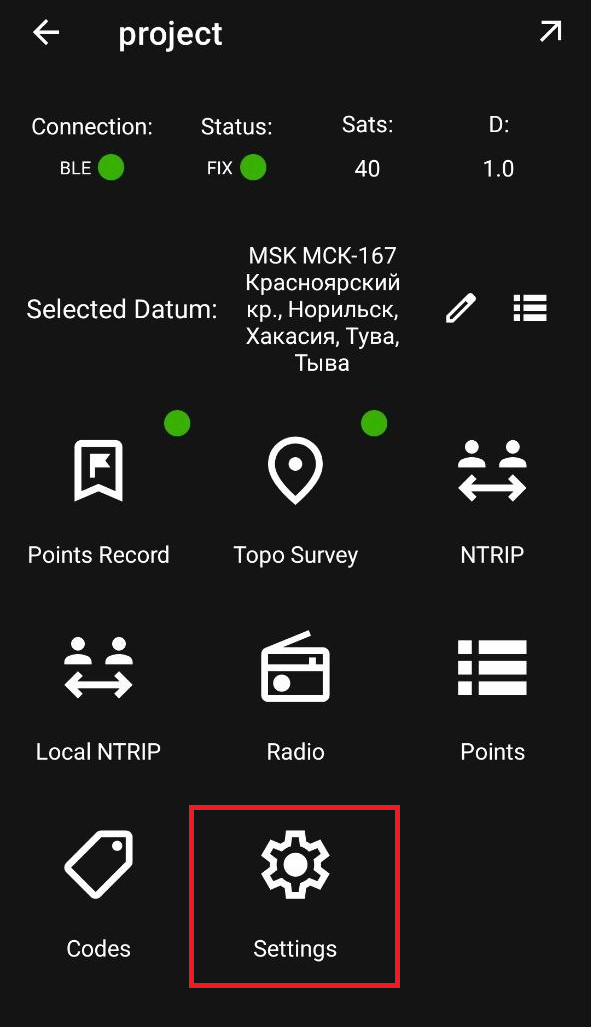
Настройки проекта
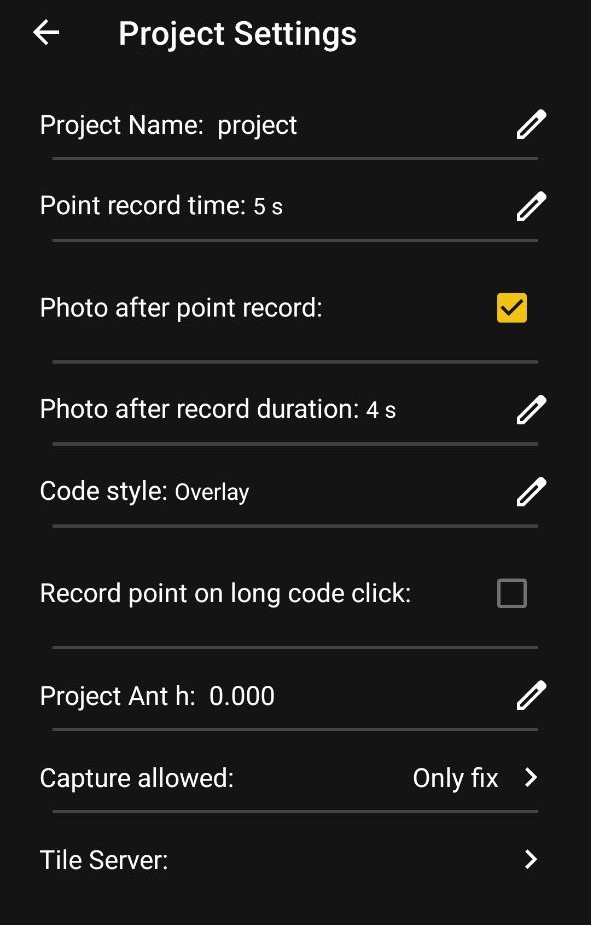
Во вкладке Project Settings доступны следующие параметры:
- Project Name: Имя текущего проекта
- Point record time: Интервал автоматической записи точек
- Photo after point record: Возможность прикрепления фото к точке
- Photo after record duration: Задержка перед съемкой фото после записи точки
- Code style: Стиль отображения кодов объектов
- Record point on long code click: Запись точки при долгом нажатии на код
- Project Ant h: Высота антенны приёмника над точкой
- Capture allowed: Допустимое качество решения для записи
Управление проектам
Просмотр проектов
При открытии вкладки Projects отображается список всех созданных вами проектов. Вы можете переключаться между ними для продолжения работы.
Удаление проекта
Для удаления ненужного проекта:
- Перейдите во вкладку Projects;
- Удерживайте нажатие на нужном проекте в списке;
- Подтвердите удаление в появившемся диалоговом окне.
Режимы работы приложения PiSatel
Режим Static
Режим Статики
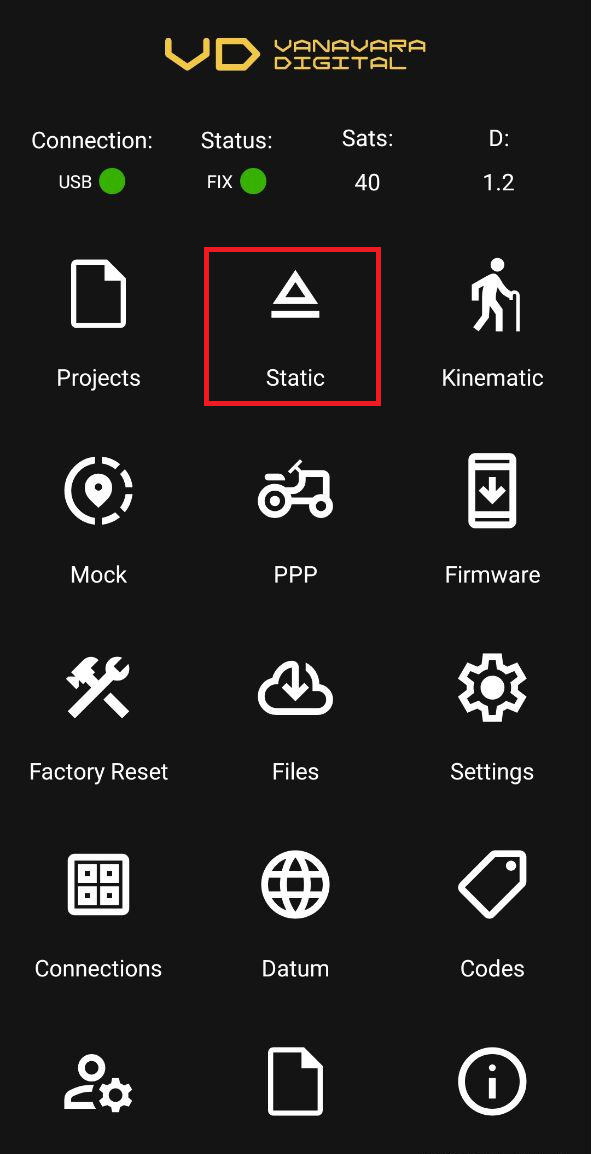
В данном режиме происходит запись спутниковых измерений в файл формата CNB. Приемник должен находиться в неподвижном состоянии. Для того чтобы начать запись данных, перейдите в раздел “Static” на главном экране. На скриншоте красным цветом выделена вкладка этого раздела.
Режим доступен при подключении к приёмнику через USB-соединение! Подробнее - в статье "Инструкция по подключению к приёмнику и настройке RTK".
Для записи статики нажмите кнопку "start recording CNB". После запуска на экране отобразится информация о количестве спутников в различных спутниковых группировках.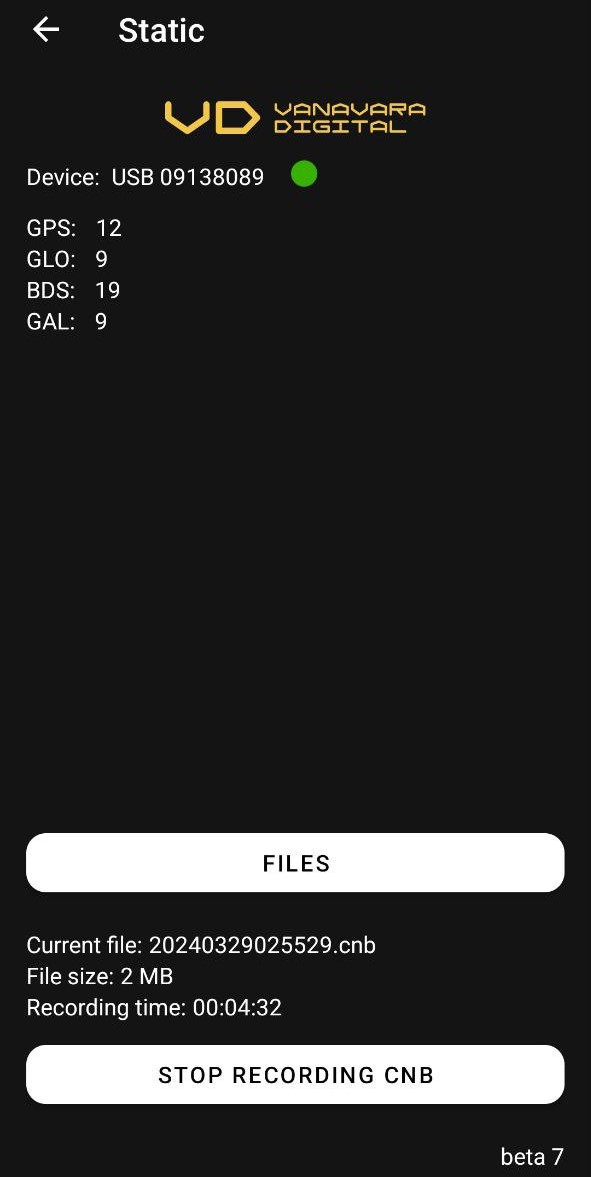
В процессе записи будут отображаться наименование файла, размер, время записи, а также серийный номер устройства. Файлы можно посмотреть в разделе “files” и отправить их в телеграмм.
Как работать с файлами статики вы можете узнать в книге Боты Vanavara Digital.
Режим Kinematic
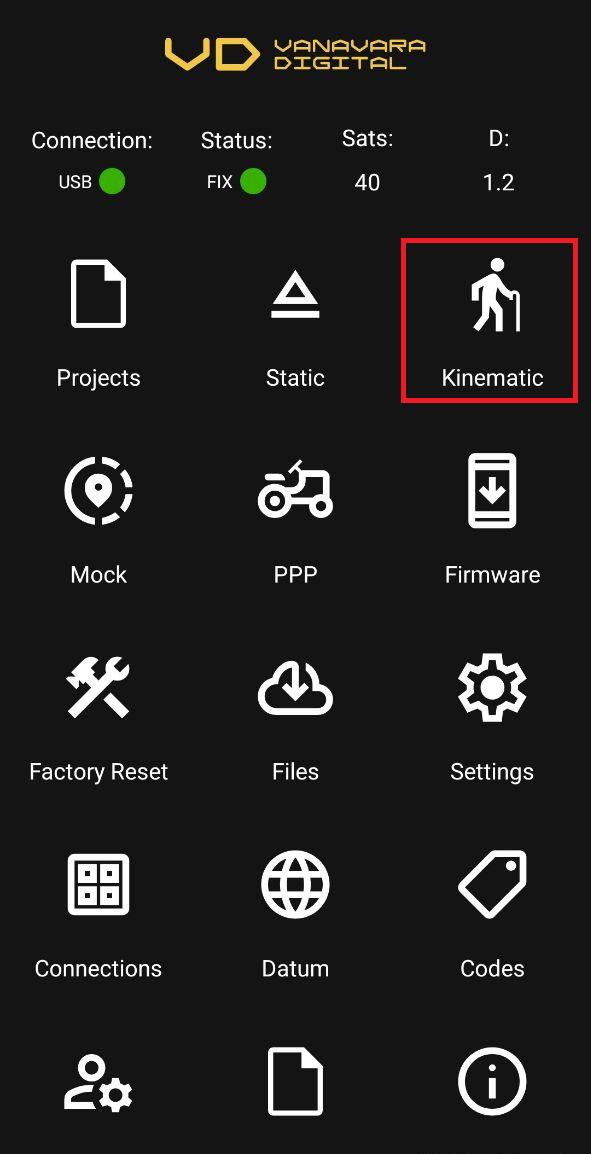
В режиме кинематики приложение записывает спутниковые измерения, при этом приемник может находиться в движении. Полученный файл может быть использован в последующей обработке методом PPK. Для работы с этим режимом, перейдите во вкладку "Kinematic" на главном экране.
Режим доступен при подключении к приёмнику через USB-соединение! Подробнее - в статье "Инструкция по подключению к приёмнику и настройке RTK".
Для начала записи нажмите кнопку "start recording kinematics".
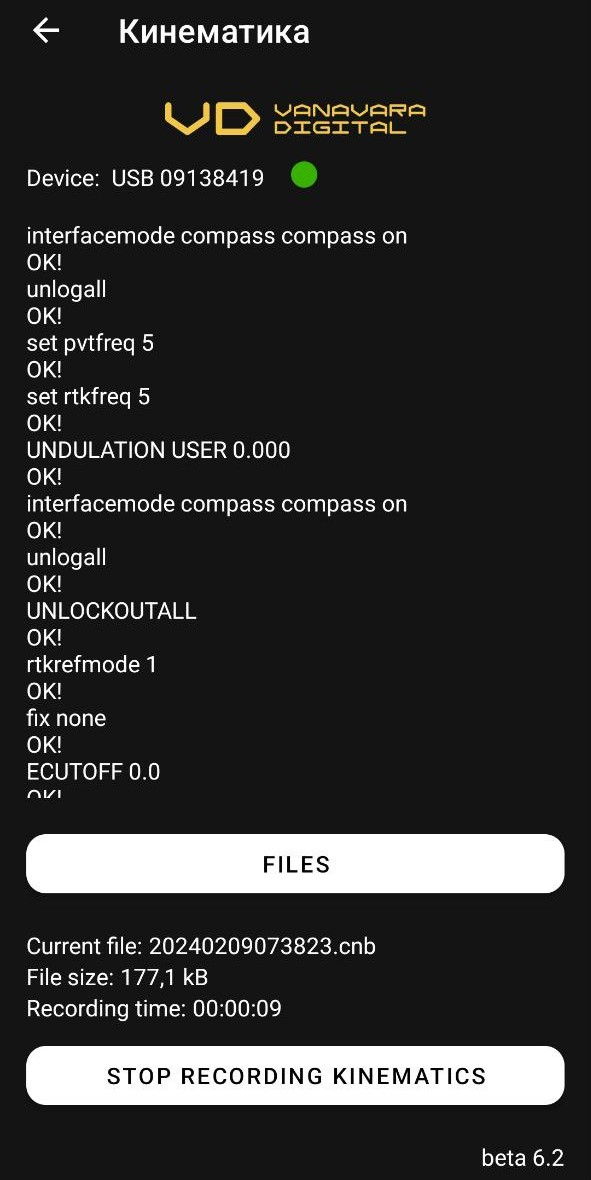
В процессе записи будут отображаться наименование файла, размер, время записи, а также серийный номер устройства. После остановки записи, вы можете просмотреть ваши файлы в разделе “files”.
Режим NTRIP
Режим NTRIP обеспечивает передачу дифференциальных поправок с устройства на бесплатный кастер сети pidt.net и позволяет использовать PiGO Lite в качестве базовой станции.
Режим NTRIP активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция NTRIP появится автоматически.

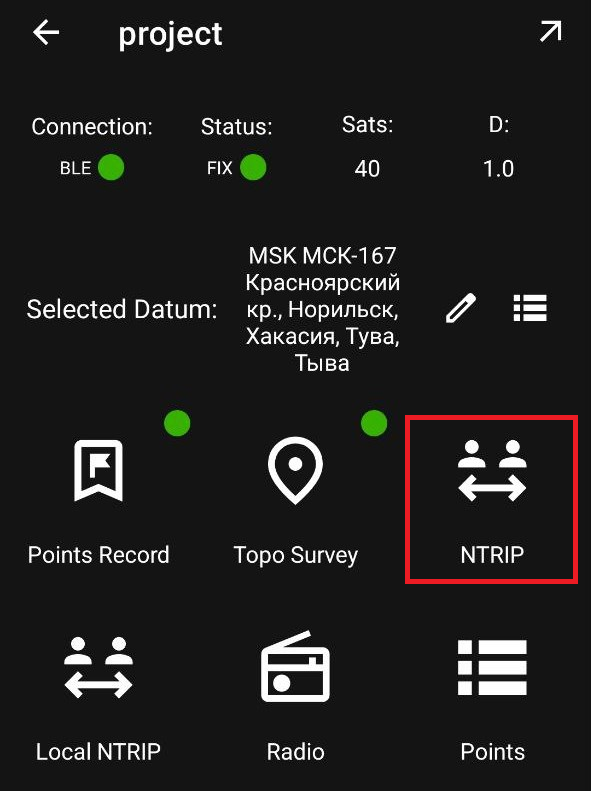
Для начала передачи поправок нажмите кнопку Start Streaming. При подключении устройства по USB станет доступна кнопка Start Recording для записи статики.
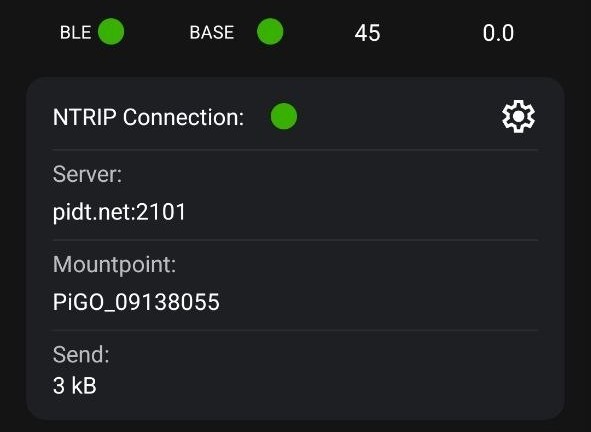
Перед началом работы, вы можете выбрать следующие параметры:
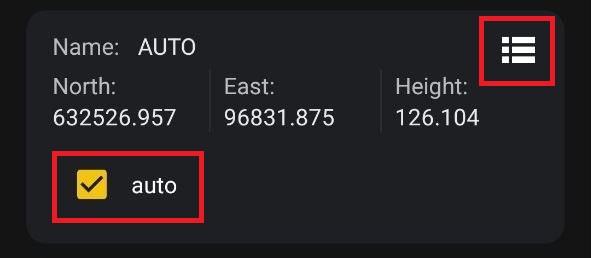
1. Координаты.
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points.
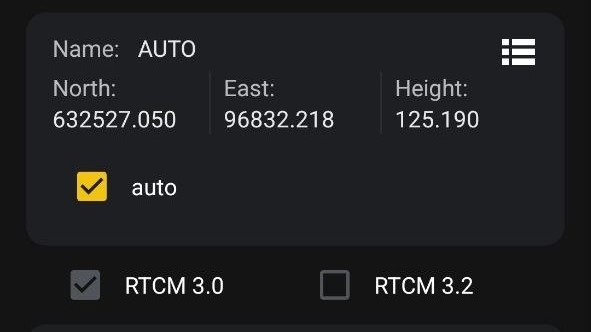
2. Формат для RTCM.
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
Подробнее о работе с бесплатным NTRIP кастером вы можете узнать в книге “Сеть РТК PiDATA”.
Режим Local NTRIP
В режиме Local NTRIP можно подключить приёмник в качестве базовой станции в локальной сети для передачи поправок с помощью протокола NTRIP. Один из сценариев использования - полёты дронов в режиме РТК. Для активации этого режима можно использовать два приёмника: один настроить как базовую станцию (локальный кастер) с помощью приложения PiSatel, второй - как ровер с помощью приложения 7Star.
Локальный кастер и ровер должны находиться в одной сети!
Режим Local NTRIP активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция Local NTRIP появится автоматически.
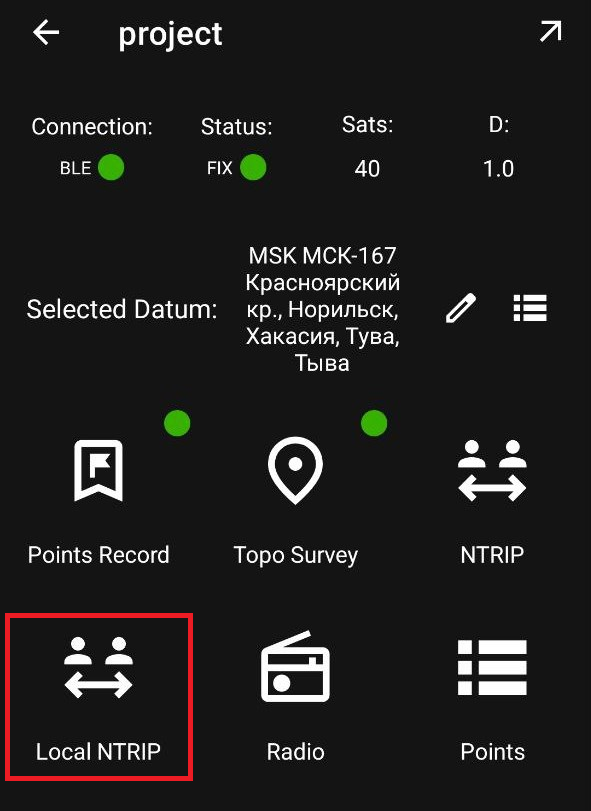
Для начала передачи поправок нажмите кнопку Start NTRIP. При подключении устройства по USB станет доступна кнопка Start Recording для записи статики.
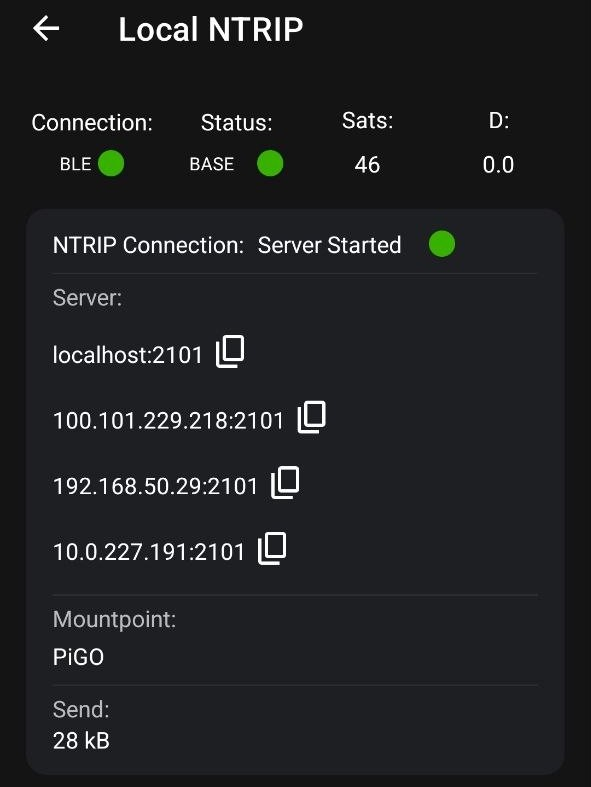
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points. Сохранить точку можно по кнопке рядом с координатами.
Чтобы подключить ровер к локальному кастеру, перейдите в 7Star в раздел "Ровер" и нажмите кнопку "Добавить". Введите данные для подключения и запросите список базовых станций кнопкой "Загрузить".
Данные для подключения:
- Хост: прописываем IP-адрес из приложения PiSatel.
- Порт: 2101.
- Логин и пароль: любые (например, 1234, проверка авторизации не требуется).
- Точка подключения: PIGO.
В статье "Быстрый старт" вы можете узнать, как подключить приёмник в качестве ровера в приложении 7Star.
Режим Radio
Небольшая инструкция, как с помощью ПО PiSatel настроить PiGO Lite в режиме базовой станции для передачи поправок по радиоканалу.
Что необходимо для данного режима работы:
- PiGO Lite в режиме базовой станции
- PiRat в режиме передачи
Порядок работы:
Настройте приёмник PiGO Lite, как базовую станцию.
Режим Radio активируется в настройках проекта. Откройте существующий проект или создайте новый в разделе Projects - опция Radio появится автоматически.
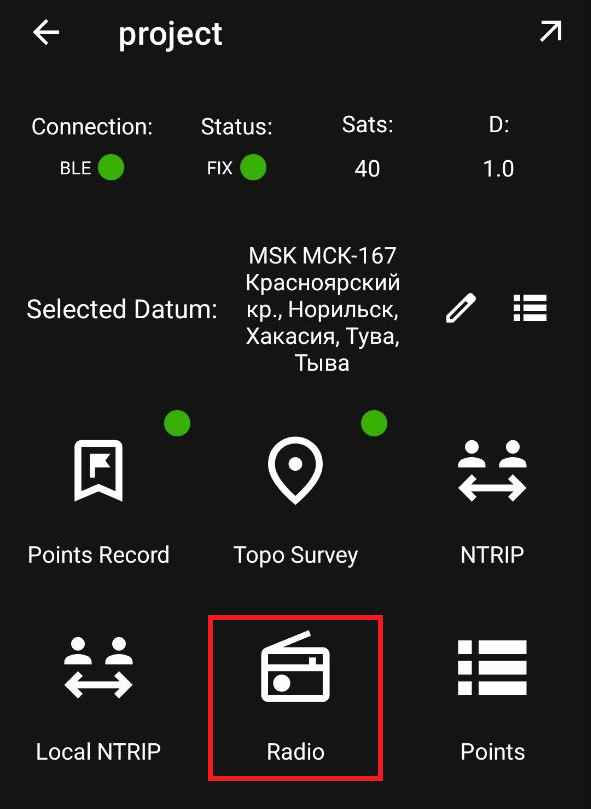
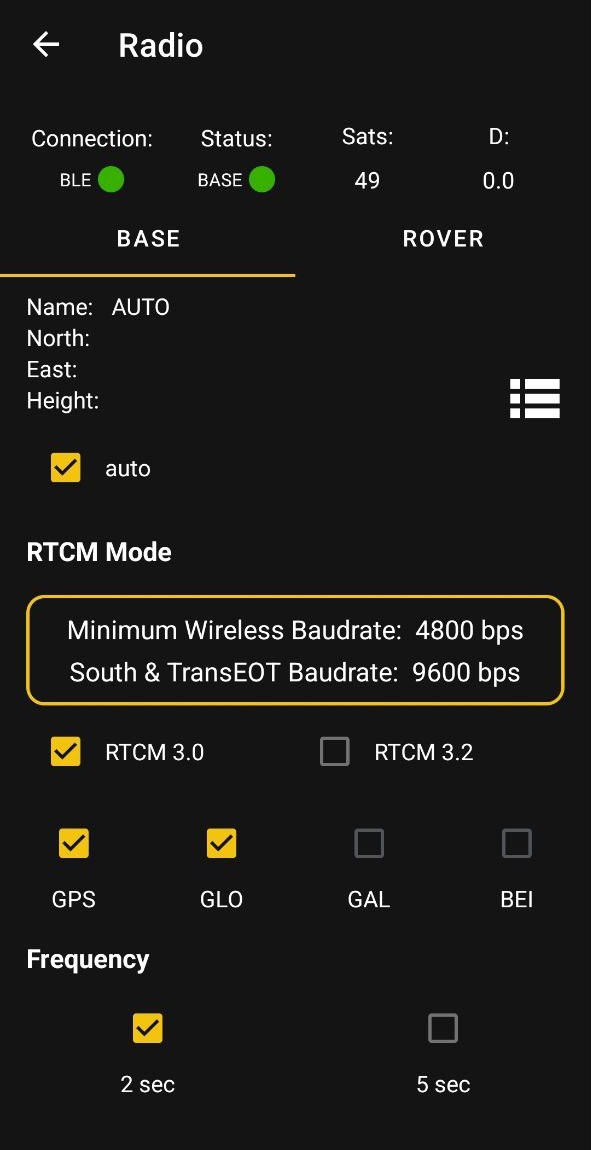
Выберите необходимые настройки:
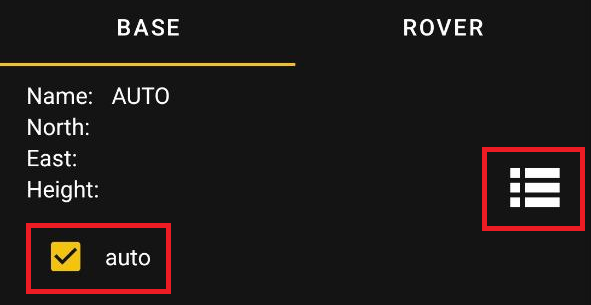
1. Настройка координат:
Координаты устанавливаются автоматически, если точность фиксированных координат является решающим фактором, то вам необходимо снять галочку с “auto” и добавить новую точку в разделе Points.
2. Настройка формата RTCM:
RTCM 3.0 - упрощённый формат сообщений для передачи поправок, который позволяет уменьшить объём передаваемых данных (используется при ограниченном канале связи или для поддержки старых приемников).
RTCM 3.2 - расширенный формат сообщений, который поддерживает передачу более точных спутниковых измерений, а также все имеющиеся спутниковые группировки.
GPS, GLO, GAL, BEI : выберите спутниковую группировку.
Frequency - выберите дискретность вещания поправок.
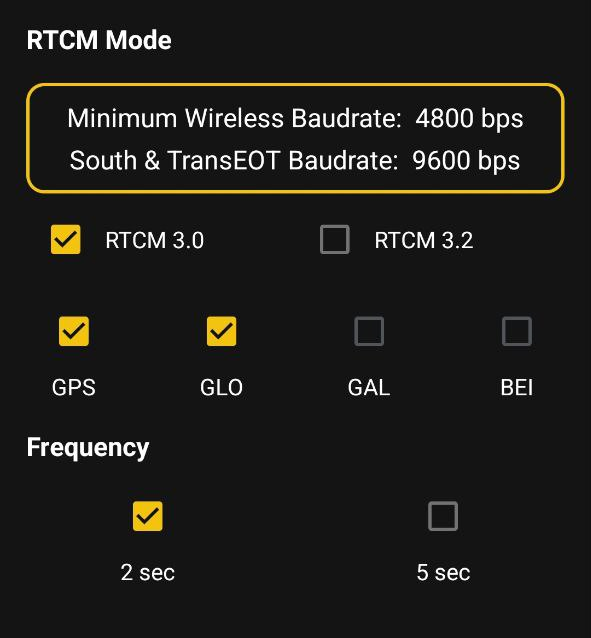
3. Нажмите кнопку “Set” для установки настроек.
Настройте PiRat в режиме передачи.
Подключите приёмник PiRat и настройте его на передачу, как показано на скриншоте. Затем сохраните выбранные настройки.
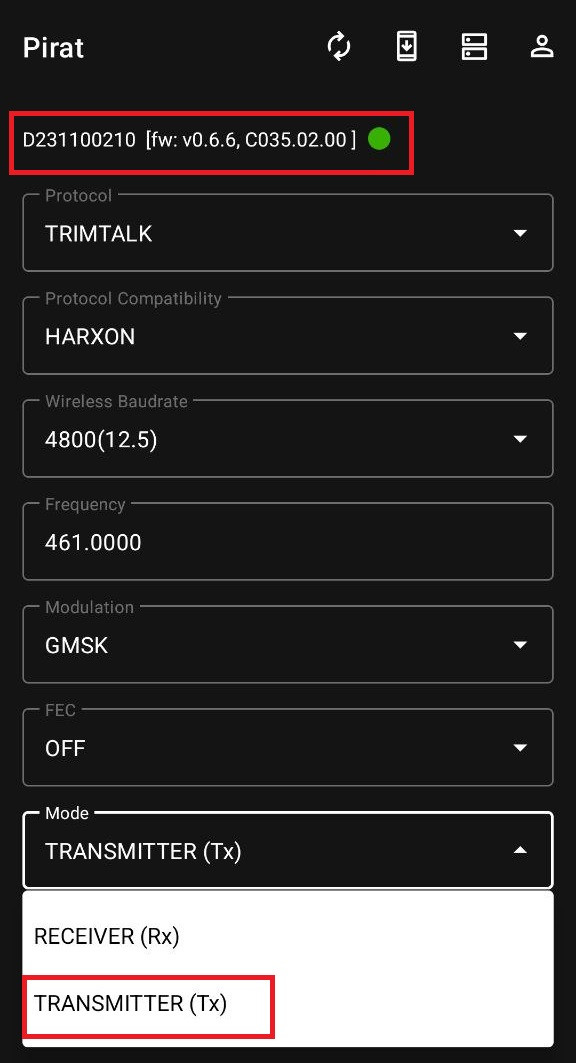
О работе приёмника УКВ PiRat можно ознакомиться в статьях "PiRat в качестве базовой станции" и "PiRat в качестве ровера".
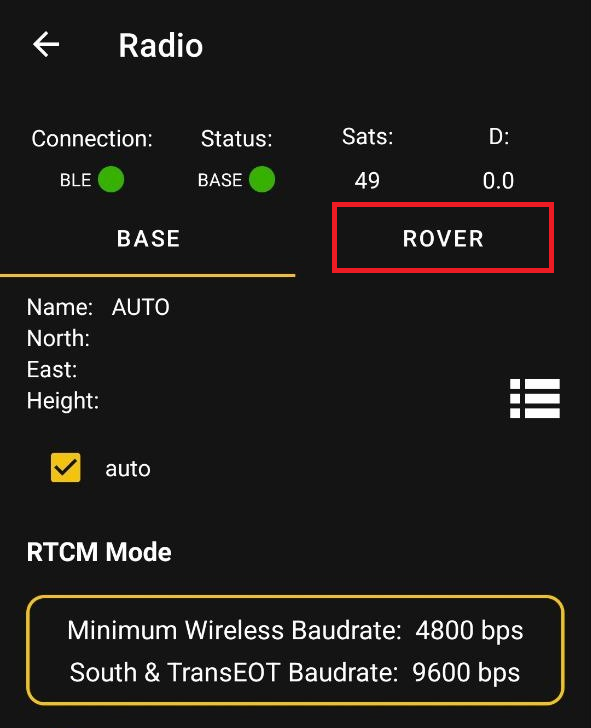
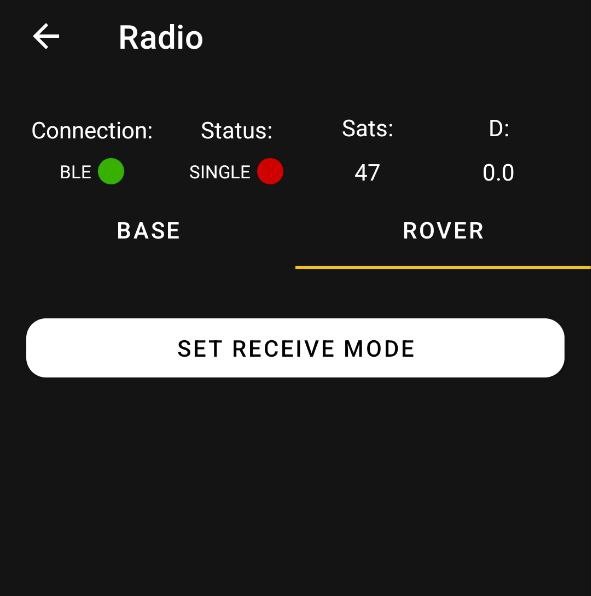
Для того, чтобы перевести PiGO Lite в режим ровера перейдите во вкладку "Rover" и активируйте настройки по кнопке "set receive mode". Убедитесь, что статус приёмника обновился. Если изменений нет, переподключитесь к устройству.
Режим фиктивного местоположения - Moсk Locations
Mock Locations - это режим, позволяющий приложению PiSatel эмулировать GPS-координаты устройства. Данная функция подменяет реальные данные о местоположении, полученные от GPS-модуля и сотовой сети, на координаты, транслируемые приёмником PiSatel.
Режим полезен для тестирования приложений, проверки геозависимого функционала и отладки ПО без физического перемещения устройства.
Предварительные требования
- Установлено приложение PiSatel;
-
Выполнено сопряжение мобильного устройства с GNSS-приёмником;
-
Настроено RTK-соединение (при необходимости).
Подробная инструкция по подключению и настройке RTK доступна в статье "Инструкция по подключению к приёмнику и настройке RTK".
Пошаговая настройка режима Mock
1. Запустите приложение PiSatel и перейдите во вкладку Mock на главном экране.

2. Настройка прав доступа
При первом входе в режим Mock необходимо предоставить приложению специальные разрешения:
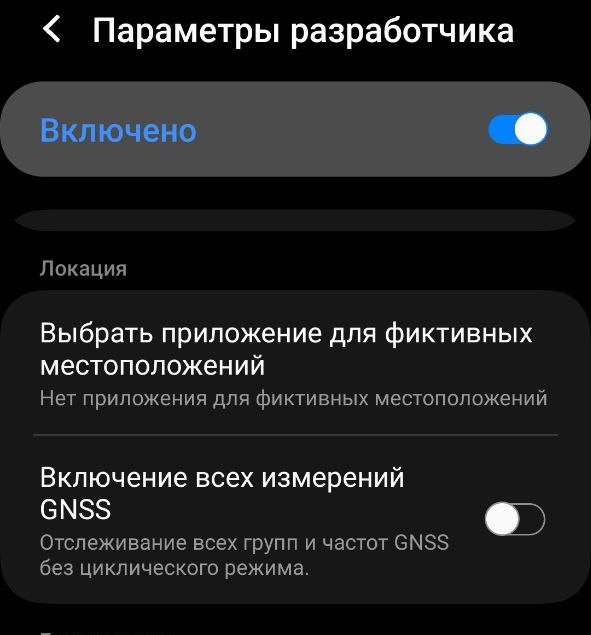
- Включите режим разработчика на вашем мобильном устройстве (если ещё не включён);
- В настройках для разработчиков найдите пункт "Фиктивные местоположения" (Mock Locations) и активируйте его;
- В появившемся системном уведомлении подтвердите переход в настройки;
- В списке приложений для эмуляции местоположения выберите PiSatel.
При переходе во вкладку Mock приложение автоматически запросит включение этой настройки. Следуйте подсказкам на экране.
3. Запуск эмуляции
- После настройки прав доступа нажмите кнопку "Start";
- Дождитесь появления системного уведомления об активации фиктивного местоположения.
4. Мониторинг параметров
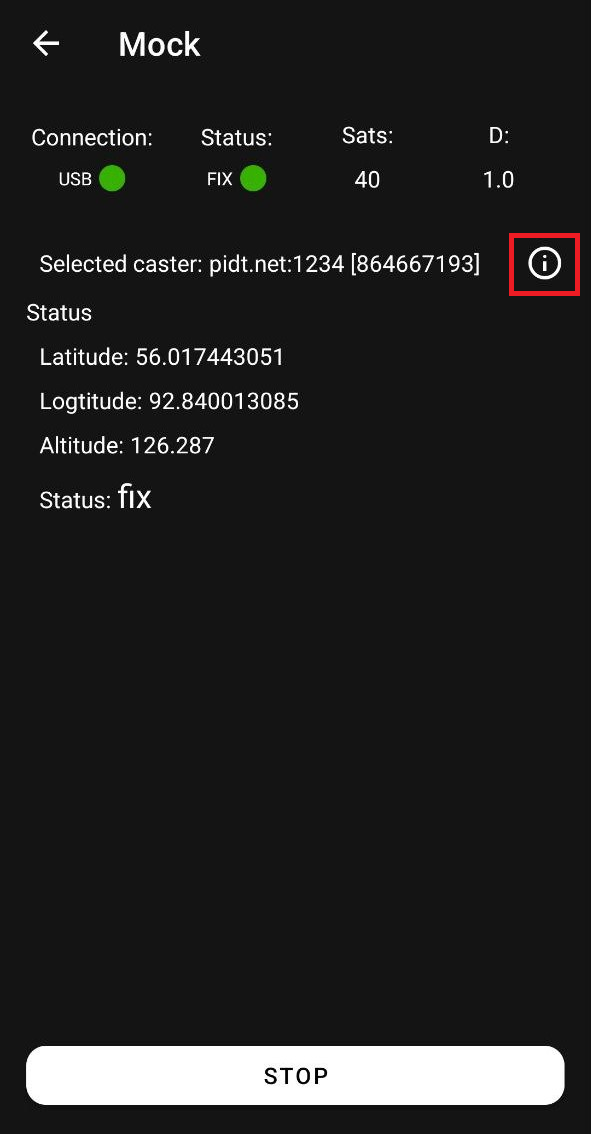
После успешного запуска режима на экране отобразятся:
- Фиктивные координаты
- Статус решения
Точность координат, дистанцию от базовой станции (Distance) и принимаемые пакеты (Received) вы можете просмотреть, нажав на кнопку, выделенную на скриншоте ниже.
Если настройка “фиктивное местоположение” выключена, режим будет не активен!
Для того чтобы проверить корректно ли работает подмена координат, вы можете перейти в ГИС приложение и проверить местоположение. В режиме Mоcк вы увидите очень точное местоположение на карте. В статье Области применения PiGO Lite вы можете прочитать как использовать подмену координат в фотограмметрии.
Точки: съёмка, хранение, управление
Управление точками
В данном разделе описан порядок добавления, редактирования и управления точками в приложении PiSatel.
Добавление точек
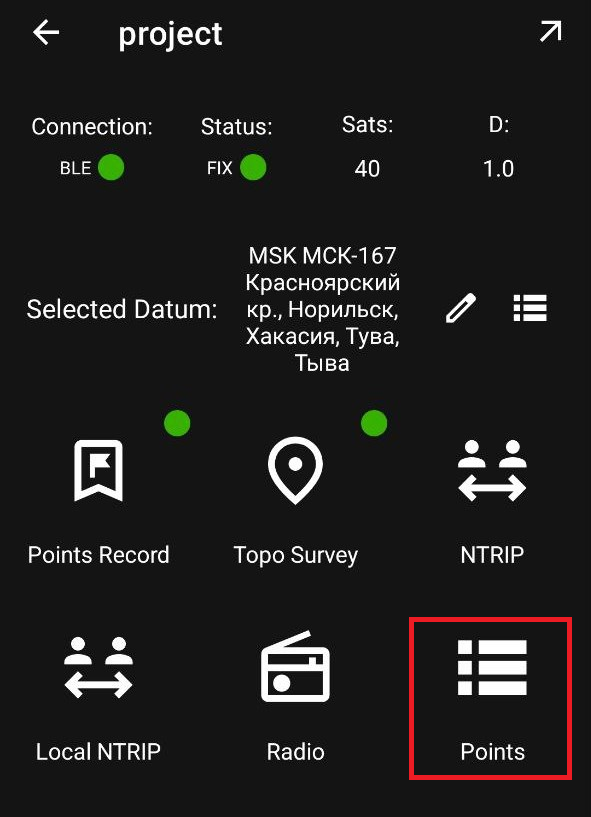
Шаг 1: Перейдите в раздел Points.
Откройте существующий проект или создайте новый в разделе Projects . После этого в интерфейсе проекта станет доступна вкладка Points.
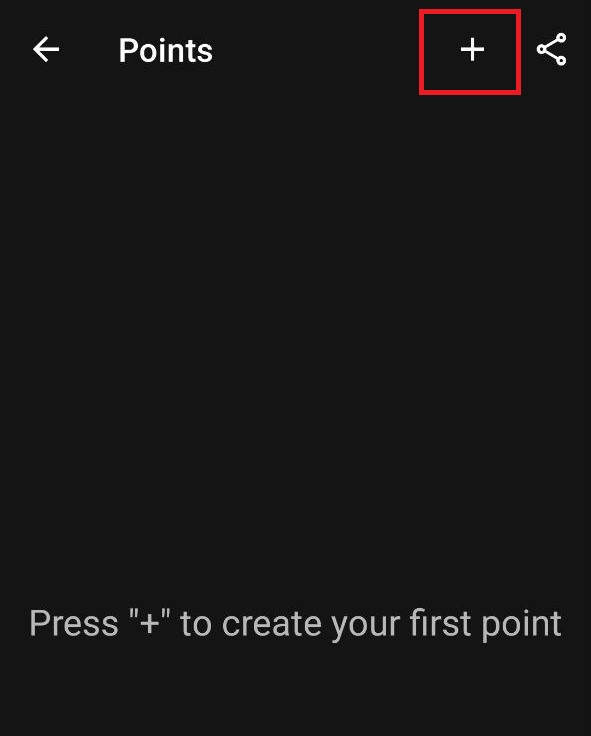
Шаг 2: Добавьте новую точку.
1. Нажмите на символ «+» в правом верхнем углу экрана.
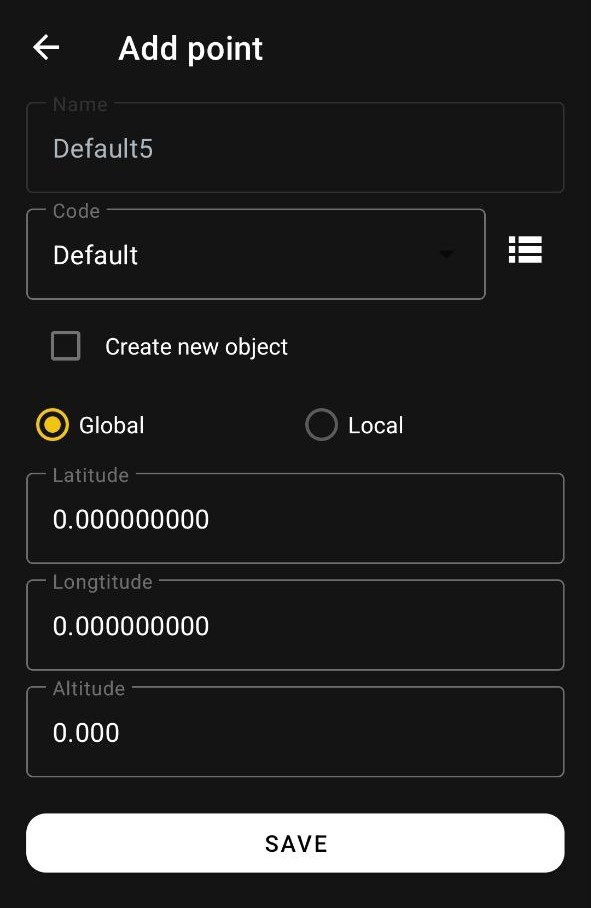
2. Заполните параметры точки.
3. Выберите формат координат:
- Global - глобальные координаты (WGS84)
- Local - локальные координаты
4. Введите координаты.
5. Нажмите кнопку “SAVE” для сохранения.
Сохранённая точка добавится в общий список и станет доступна для экспорта.
Редактирование точек
1. Нажмите на нужную точку в списке.
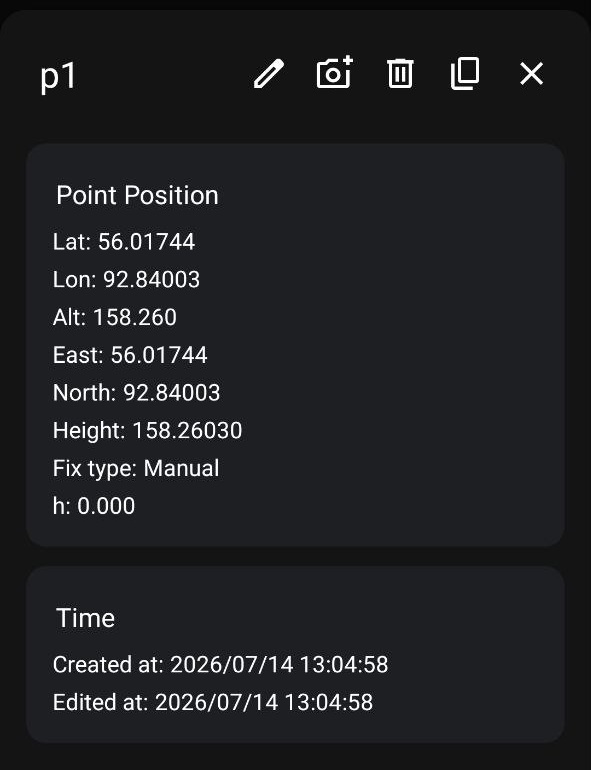
2. Откроется окно с подробной информацией о точке.
- Географические координаты (Lat, Lon, Alt)
- Проекционные координаты (East, North, Height)
- Дату и время создания (Created at)
- Снимок точки
3. Доступные действия:
В окне информации о точке доступны следующие операции:
- Редактировать данные точки
- Добавить снимок к точке
- Удалить точку
- Копировать точку в буфер обмен
Для применения точки достаточно выбрать её в общем списке. Приложение также поддерживает множественное удаление. Для этого выделите необходимые точки — после выделения в верхней части списка появится значок корзины, позволяющий удалить выбранные элементы одновременно.
Topo Survey: Режим топографической съемки
Данная инструкция описывает процесс работы с модулем топографической съёмки.
Подготовка к работе
Перед началом съёмки точек убедитесь, что:
-
Приёмник подключён (индикатор “Connection” горит зелёным)
-
Получен статус “FIX” (индикатор “Status” горит зелёным)
-
Достаточное количество спутников
Запуск режима съёмки
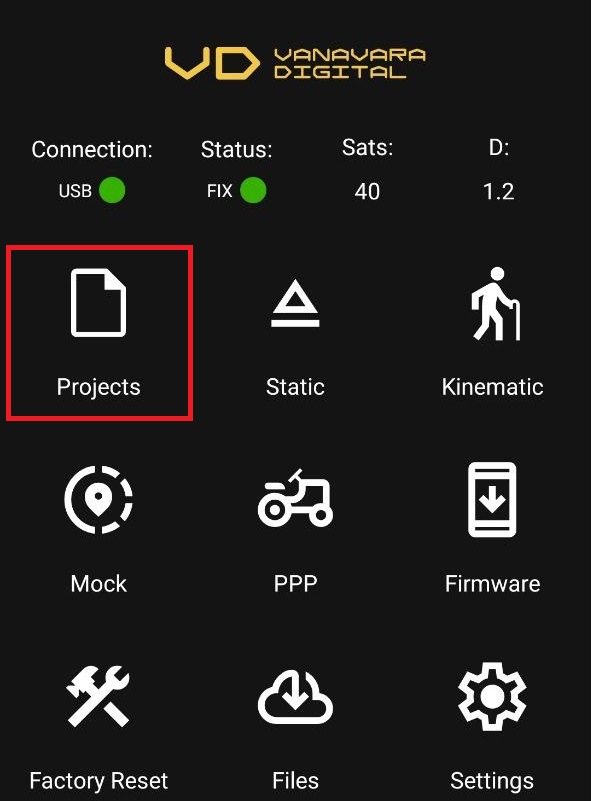
- Откройте раздел "Projects".
- Создайте новый проект или откройте существующий.
- Перейдите во вкладку "Topo Survey". Опция станет доступной автоматически после выбора проекта.
Настройка параметров (Project Settings)
Перед началом записи точек рекомендуется проверить настройки во вкладке "Project Settings", чтобы данные записывались корректно:
-
Project Name: Имя текущего проекта
-
Point record time: Интервал автоматической записи точек
-
Photo after point record: Возможность прикрепления фото к точке
-
Photo after record duration: Задержка перед съемкой фото после записи точки
-
Code style: Стиль отображения кодов объектов
-
Record point on long code click: Запись точки при долгом нажатии на код
-
Project Ant h: Высота антенны приёмника
-
Capture allowed: Допустимое качество решения для записи
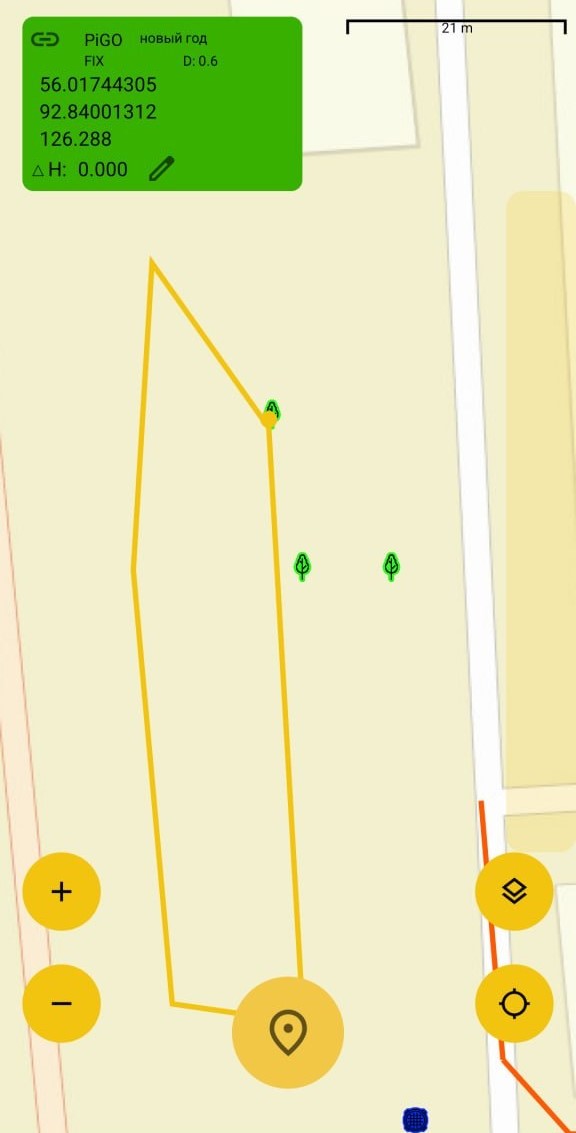
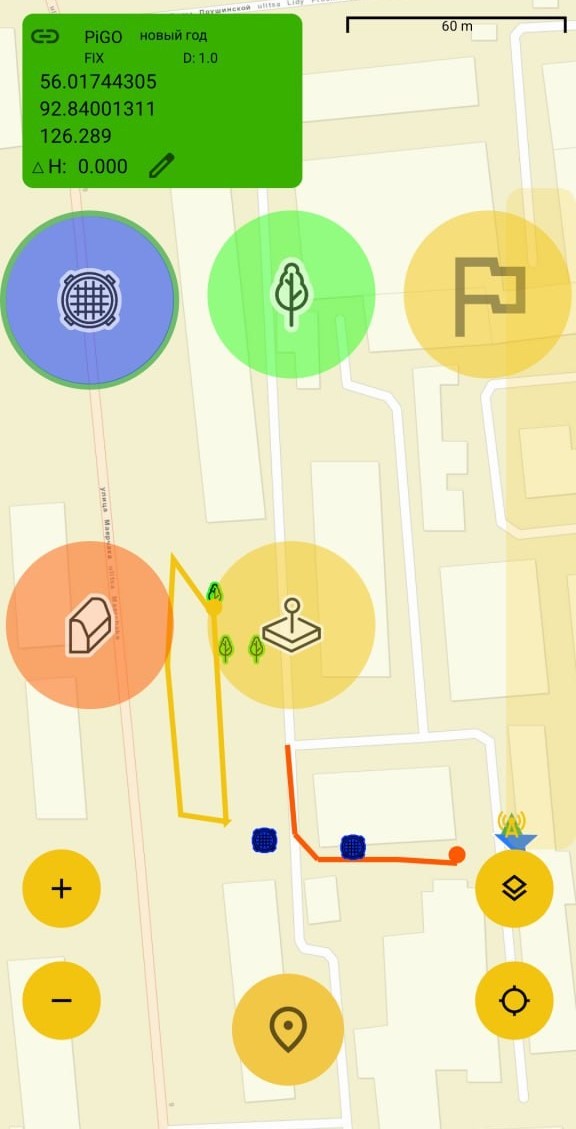
Процесс съёмки
Когда настройки проверены, а статус «FIX» получен, можно приступать к работе на местности.
- Запись точки: Нажмите на центральную кнопку для записи точки.
- Фотофиксация: Сразу после записи координат появится кнопка камеры. Нажмите её, чтобы сделать привязанное к точке фото.
- Настройки: масштабирование карты, фокусировка камеры на точке и отображение базовых станций.
Points Record: Режим записи точек
Пошаговая инструкция по работе с режимом записи точек в приложении PiSatel.
Подготовка к работе
Перед началом записи точек убедитесь, что:
- Приёмник подключён (индикатор “Connection” горит зелёным)
- Получен статус “FIX” (индикатор “Status” горит зелёным)
- Достаточное количество спутников
Создание проекта и начало записи
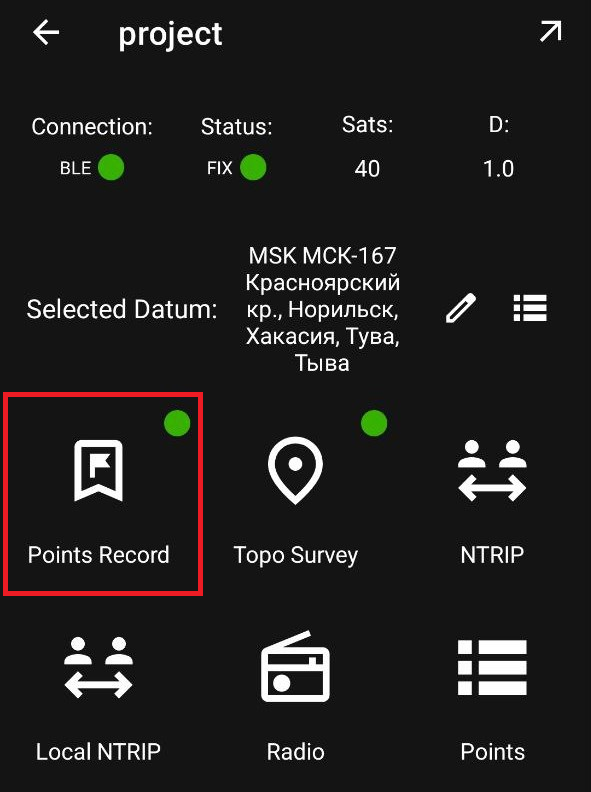
Шаг 1: Перейдите во вкладку Points Record
Откройте существующий проект или создайте новый в разделе Projects - опция Points Record появится автоматически.
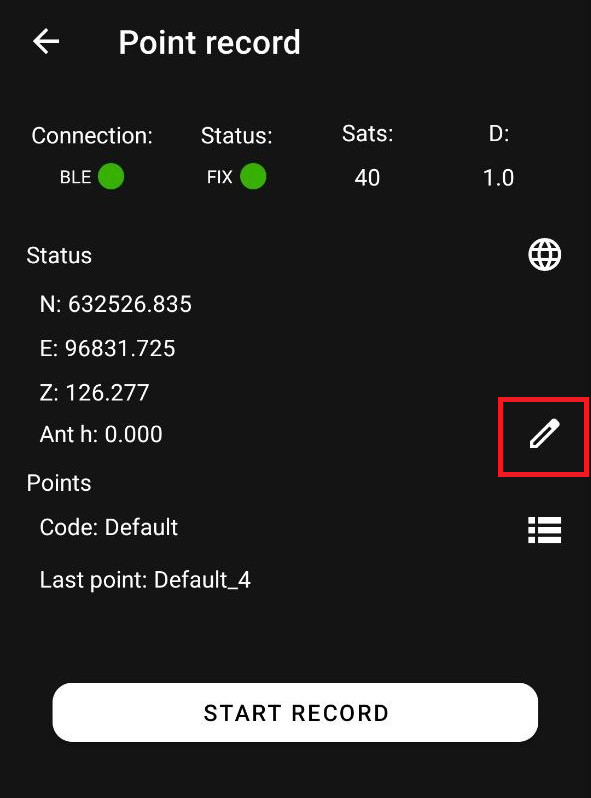
Шаг 2: Настройте параметры точки
Перед началом записи необходимо настроить параметры:
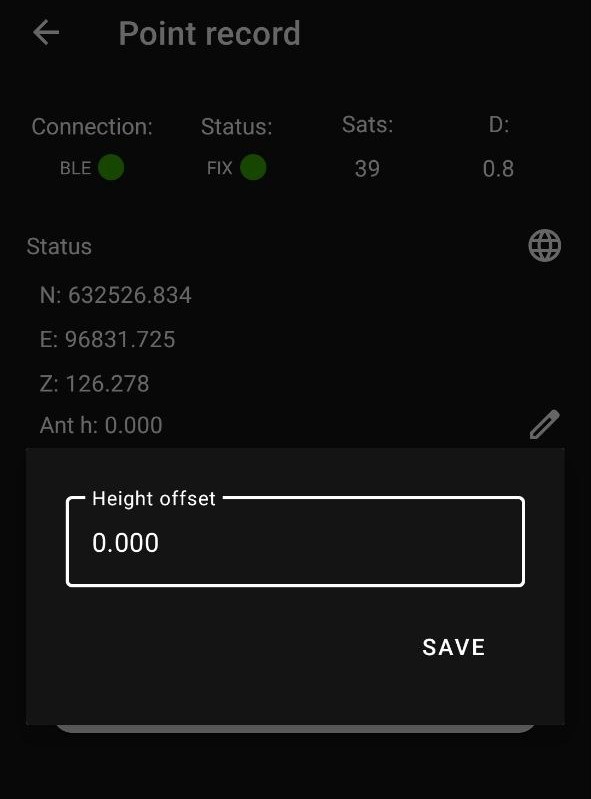
Высота антенны (Ant h):
- Нажмите на иконку карандаша рядом с полем “Ant h”
- Введите значение высоты offset (смещение по высоте)
- Нажмите “SAVE” для сохранения
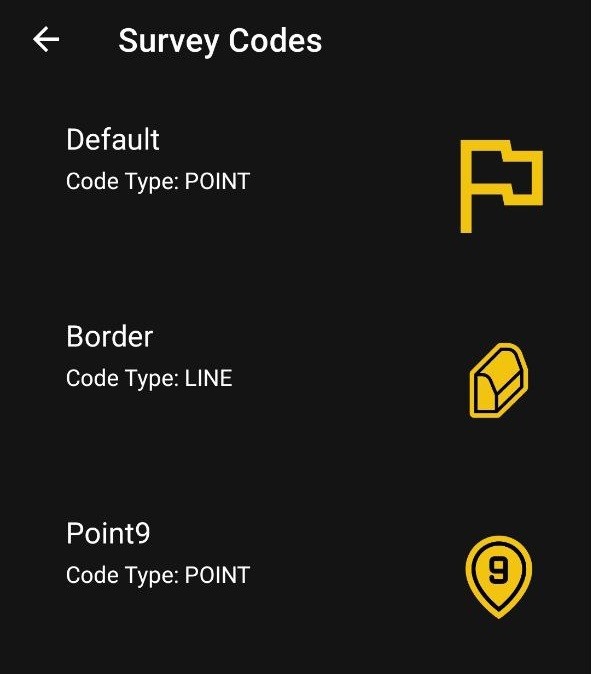
Код точки:
- В разделе “Points” укажите код точки в поле “Code”
- По умолчанию установлено значение “Default”
- Код используется для идентификации точек при отображении на карте
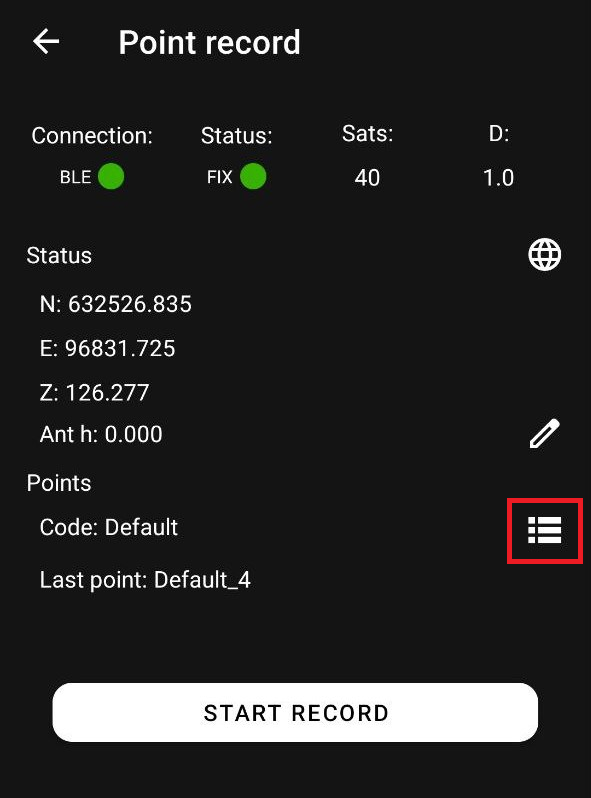
Шаг 3: Начните запись
Нажмите кнопку “START RECORD” для начала записи точек.
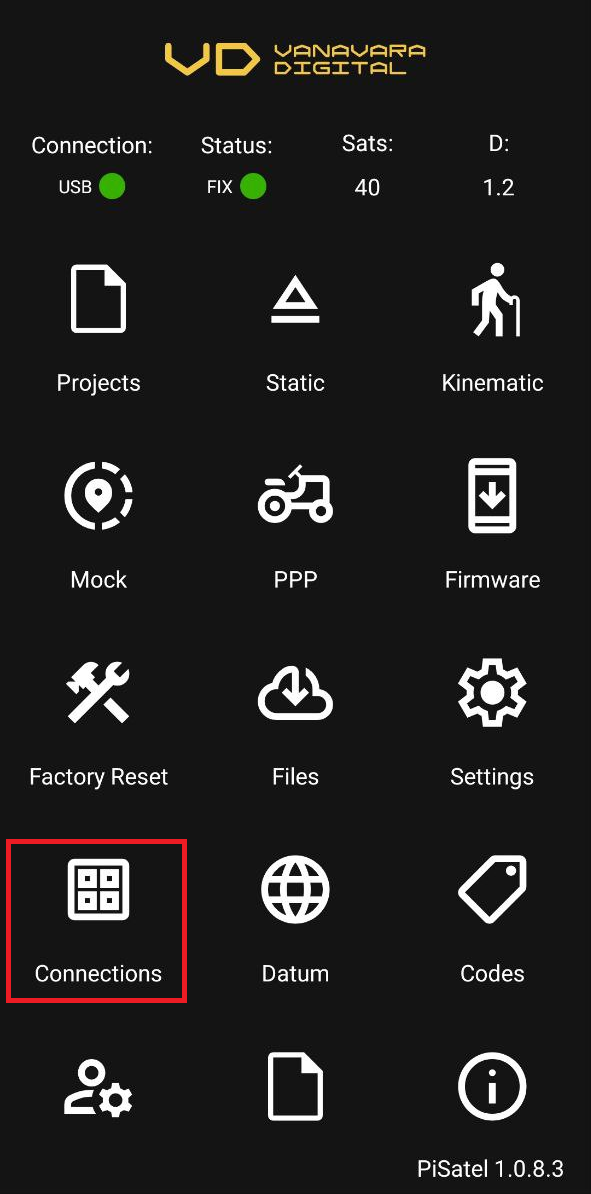
Настройка RTK подключения
Чтобы внести данные о сети РТК, перейдите в раздел Connections. На скриншоте красным цветом выделен этот раздел. Нажмите на символ "+" в правом верхнем углу, введите данные и нажмите кнопку "save".
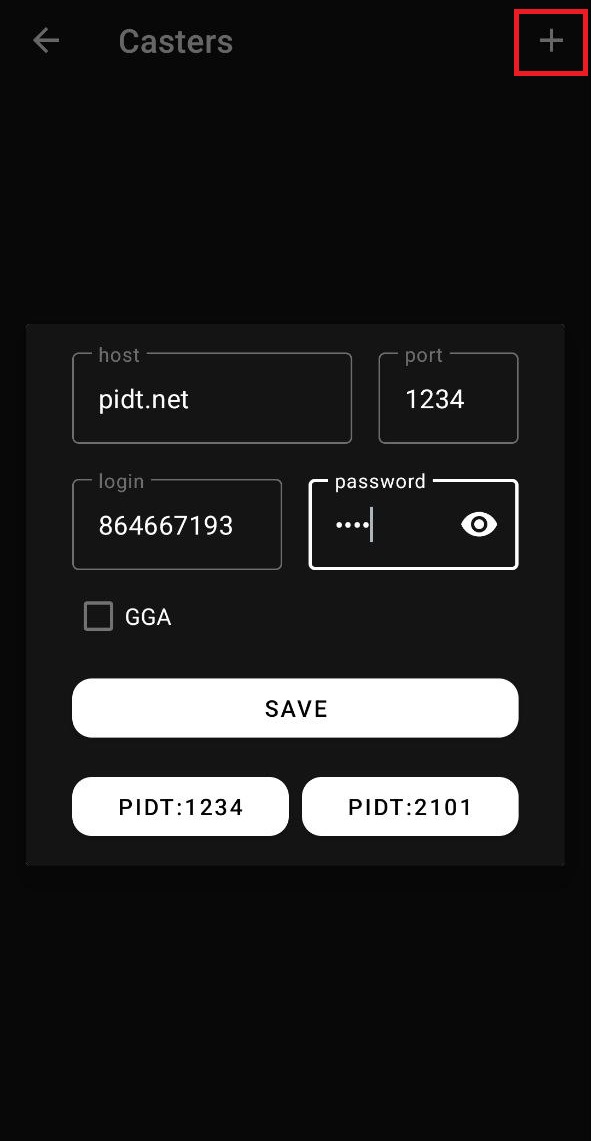
После сохранения, выберите определённую сеть и она будет автоматически добавлена в соответствующие поля.
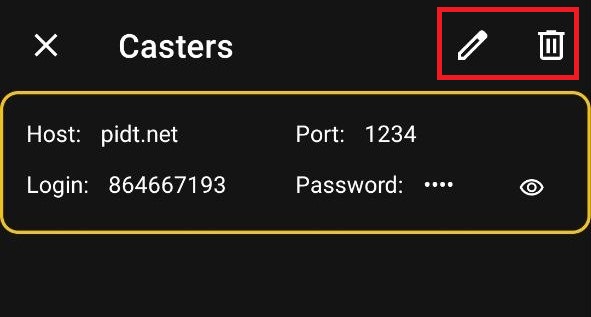
Для внесения изменений или удаления данных необходимо удерживать долгое нажатие на выбранной сети. После этого в правом верхнем углу появятся опции редактирования и удаления.
Воспользоваться сохранённой сетью можно в режиме Moсk Locations.
Системы координат и калибровки
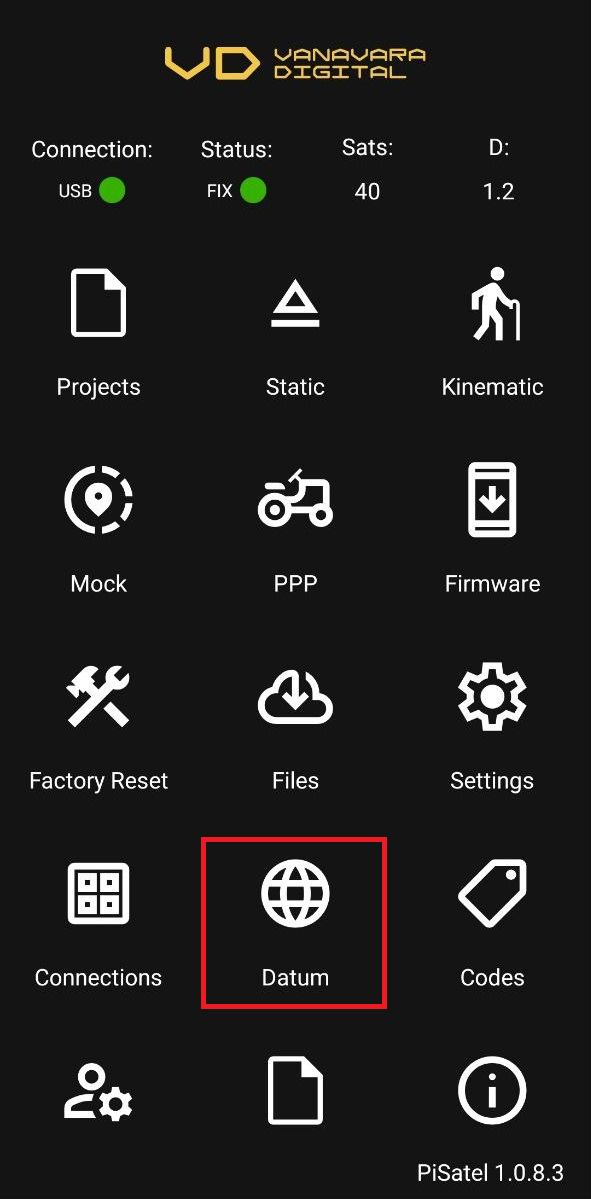
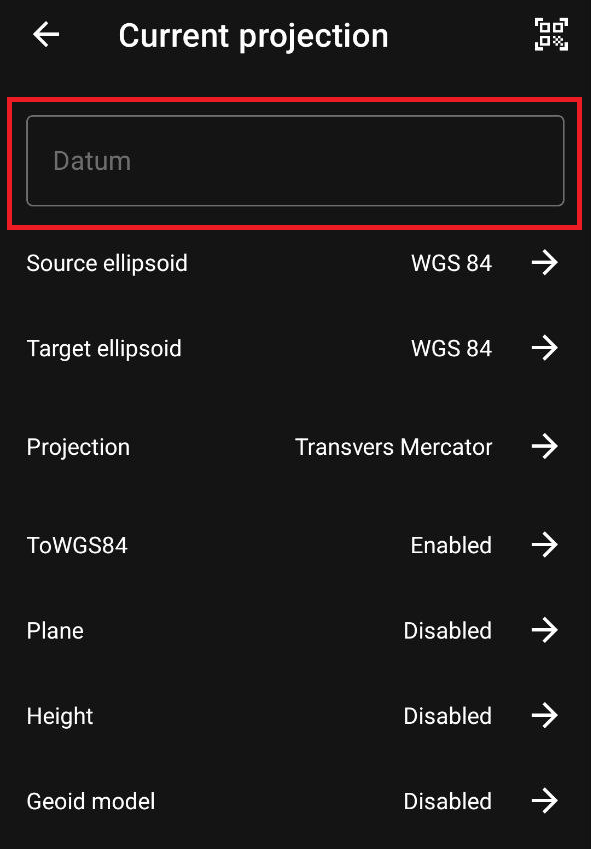
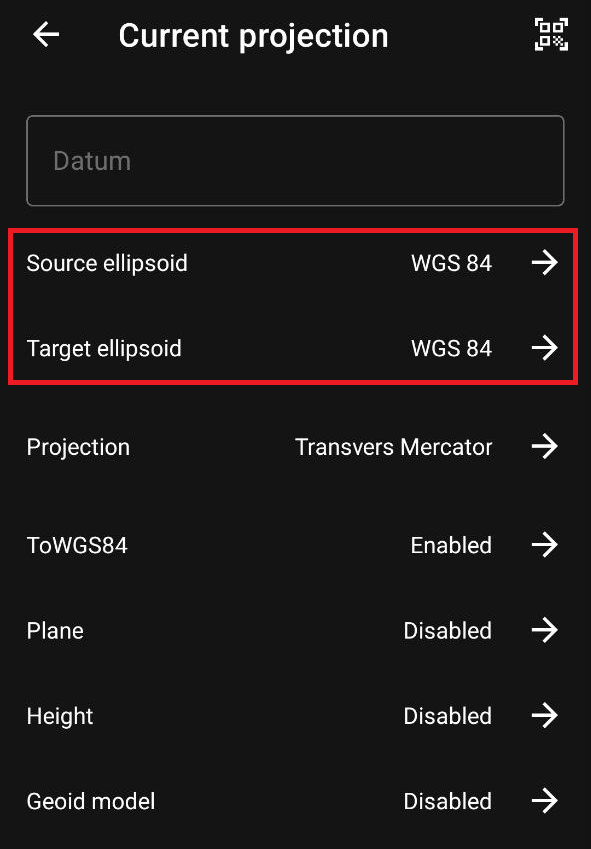
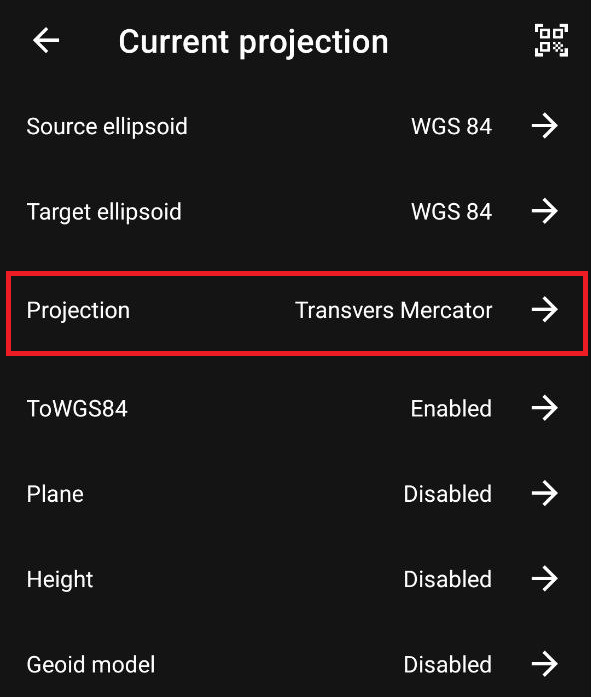
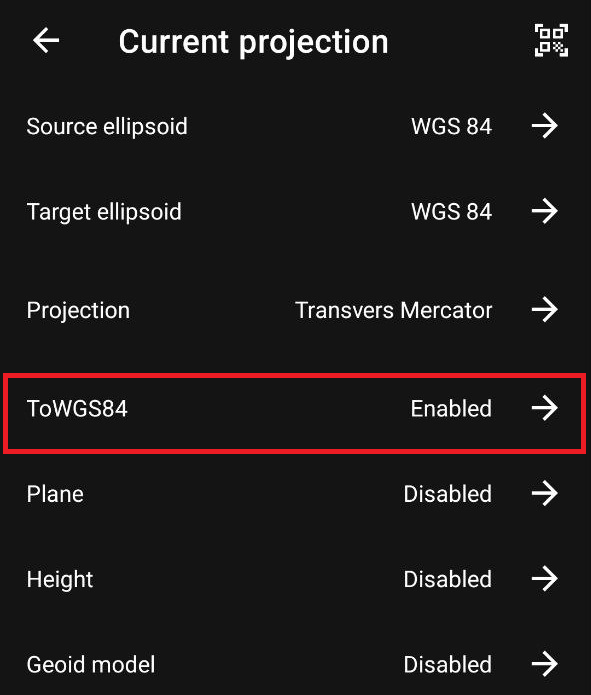
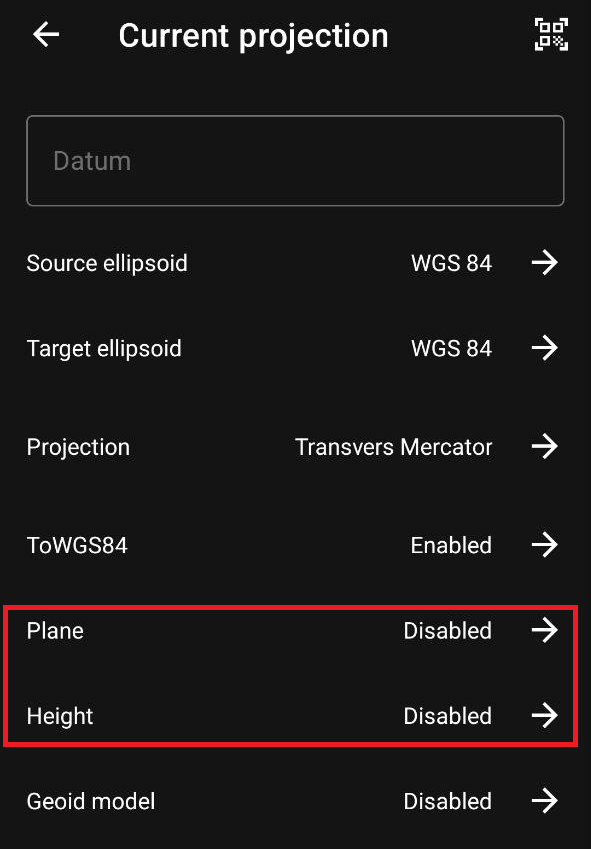
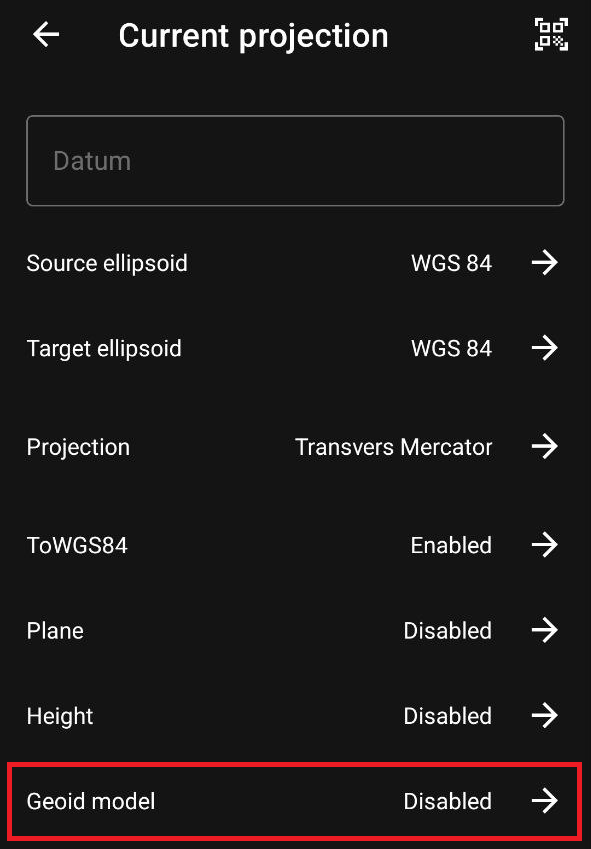
В разделе Datum выполняются операции связанные с созданием и управлением системами координат и их параметрами. Раздел состоит из следующих блоков:
-
Datum - Имя системы координат
-
Source ellipsoid - Исходный эллипсоид
-
Target ellipsoid - Целевой эллипсоид
-
Projection - Параметры проекции
- ToWGS84 - Пользовательский datum
-
Plane - Калибровка в плане
-
Height - Калибровка по высоте
-
Geoid model - Модель геоида
На скриншоте красным цветом выделена кнопка для перехода в раздел Datum.
Порядок установки системы координат
Установка системы координат вручную
1. Укажите имя системы координат и выберите эллипсоид.
2. Настройте параметры проекции и пользовательский datum.
3. Настройте калибровку в плане и по высоте. Загрузите модель геоида для приведения эллипсоидальной высоты к нормальной.
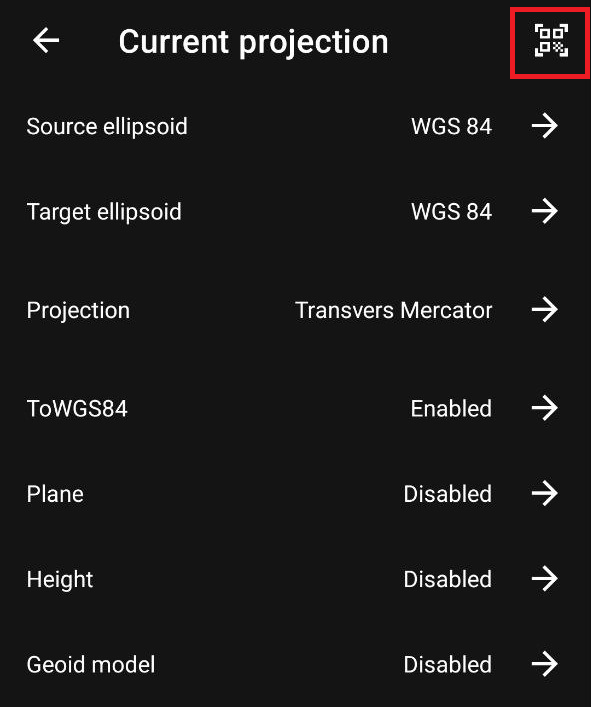
Импорт системы координат
Для установки системы координат переходим в Telegram бота PRJ to QR, в строке сообщения пишем: @findprjbot МСК и выбираем нужную зону. В ответ бот отправит QR код, содержащий информация о вашей СК и калибровке для расчета высоты. Для загрузки системы координат в PiSatel, откройте камеру в правом верхнем углу экрана и наведите на QR код.
Как загрузить систему координат из стороннего ПО читайте в книге “Миграция из стороннего ПО”.
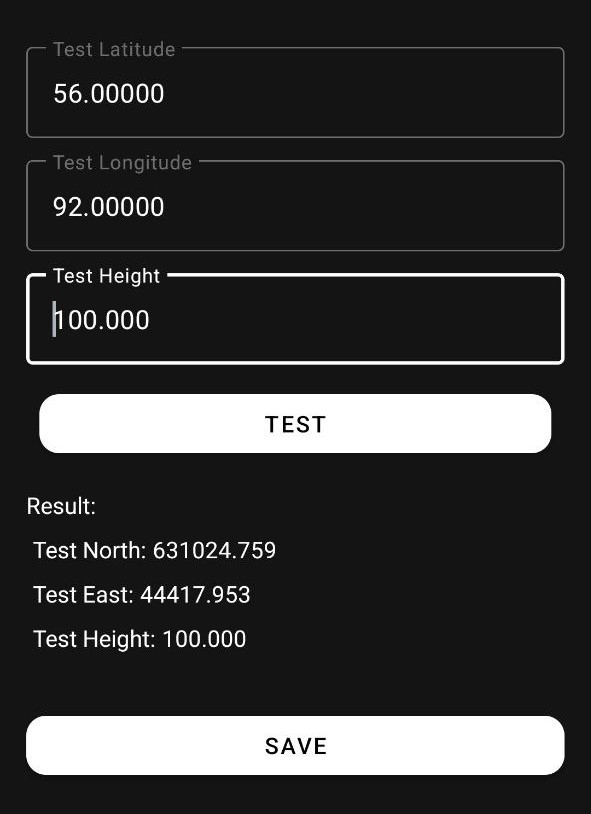
Тестирование
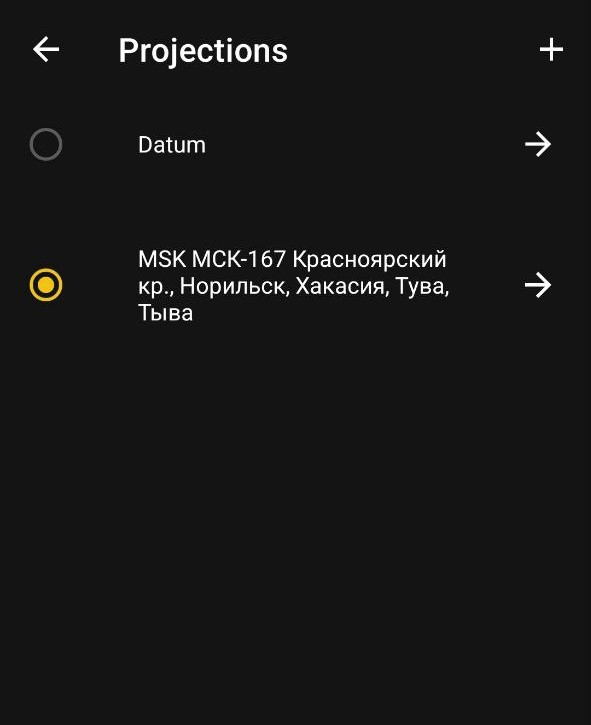
После того, как вы настроили систему координат, убедитесь, что PiSatel корректно показывает локальные координаты точки, проведя тестовую проверку при помощи кнопки "Test". В случае правильного отображения координат, сохраните установленную систему координат. Добавленные системы координат будут представлены в этом же разделе. Выберите необходимую систему координат из списка для дальнейшего пользования.
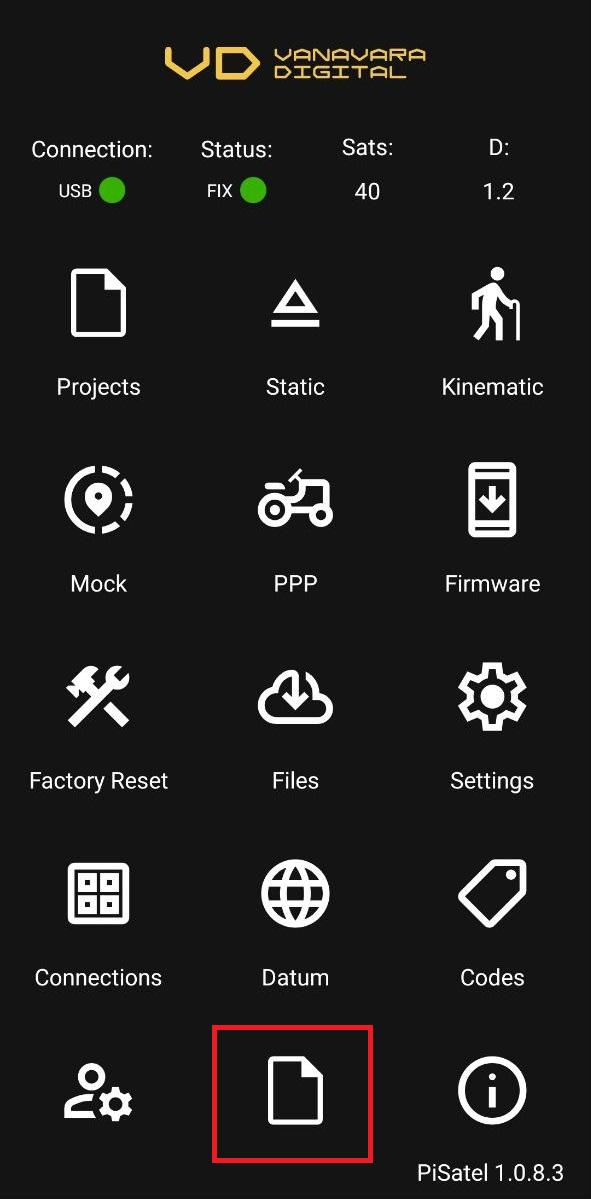
Авторизация в сервисах PIDT.NET
Откройте главный экран и перейдите в раздел "User" для прохождения авторизации. Кнопка для перехода в этот раздел выделена на скриншоте ниже.
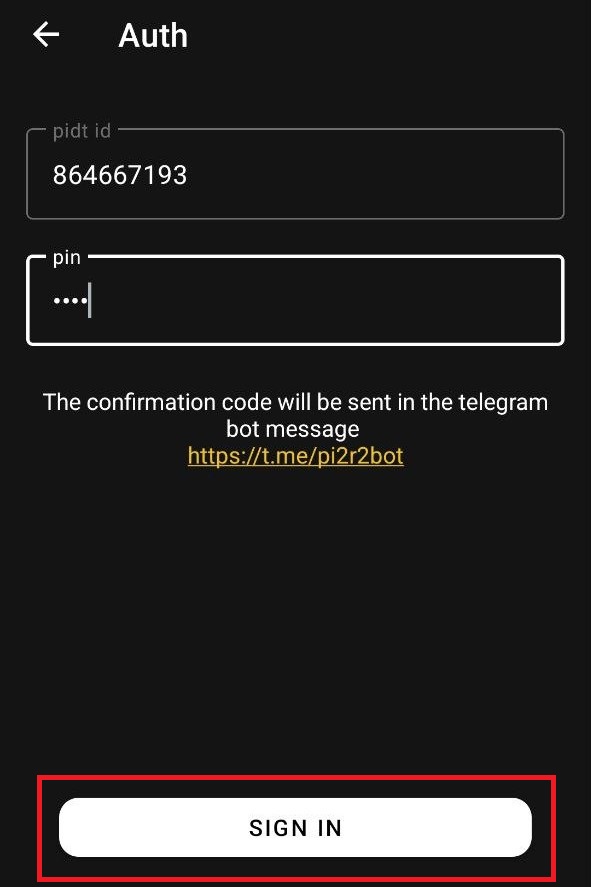
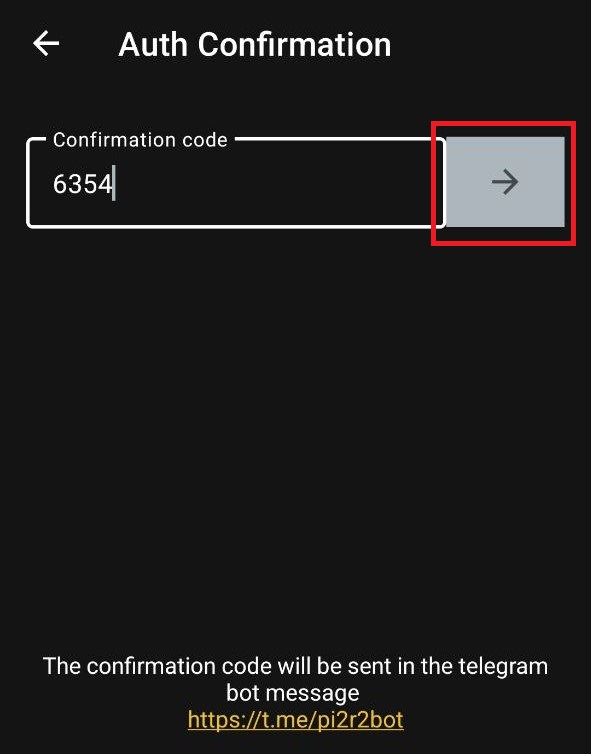
Введите в соответствующие поля логин и пароль от бота PiDATA User Bot и нажмите кнопку "Sign IN". Далее вы получите код от бота PiDATA User Bot, который нужно будет ввести в поле и отправить. После успешной авторизации появится ваш профиль.
После прохождения авторизации будет доступна функция синхронизации точек. Как использовать собственные точки в приложение PiSatel читайте в статье “Управление точками”.